 2015-01-21
2015-01-21 1820
1820Выбором только параметров системы измерения, устройства формирования команд и исполнительных устройств автопилота (силового привода рулей) не удается создать контур управления с требуемыми динамическими свойствами. Для обеспечения заданных требований используются корректирующие обратные связи автопилота, которые позволяют уменьшить влияние изменений условий полета ЛА на характеристики объекта управления и соответственно замкнутого контура управления. Однако при управлении полетом ракет этих мер недостаточно, так как увеличение глубины обратной связи обычно ограничено собственной инерционностью датчиков обратных связей, которые приводят к снижению устойчивости объекта управления. Поэтому в сложных условиях для обеспечения требуемых динамических свойств объекта управления используют адаптацию или самонастройку, которая учитывает изменение полетных условий.
Синтез структуры оптимального контура управления основывается на гипотезе, что динамические характеристики ЛА известны. Однако характеристики ЛА могут отличаться на 10 - 40% в группе ракет одного типа. Значительное изменение характеристик вызывается широким диапазоном высоты и скорости полета ЛА. Играют роль также уход коэффициентов усилений, передаточных чисел, постоянных времени автопилота из-за естественного старения и изменения условий эксплуатации, устранить который регламентными работами не всегда удается. Поэтому объект управления характеризуется существенно нестационарными характеристиками. Стабилизирующих свойств обратных связей автопилота иногда недостаточно, чтобы компенсировать влияние изменения условий полета. Поэтому применение систем управления, в которых не учитываются условия полета, становится невозможным. Возникает необходимость создания автопилотов, которые автоматически, анализируя поведение системы ракета – автопилот, корректировала бы свои характеристики для получения требуемого качества управления. Подобные системы получили название самонастраивающихся.
|
|
|
Для решения задачи самонастройки необходимо выделить настраиваемые параметры, регулирование которых парирует влияние возмущений. Удобно представить автопилот состоящим из двух частей: одна из них с коэффициентом передачи  характеризует прямую цепь, вторая с коэффициентом передачи
характеризует прямую цепь, вторая с коэффициентом передачи  характеризует обратную связь автопилота. Выражение для передаточной функции автопилота с ЛА имеет вид:
характеризует обратную связь автопилота. Выражение для передаточной функции автопилота с ЛА имеет вид:
 .
.
Из передаточной характеристики видно, что возникающие изменения в передаточной функции ЛА  и всего контура автопилота могут компенсироваться элементами прямой и обратных связей.
и всего контура автопилота могут компенсироваться элементами прямой и обратных связей.
|
|
|
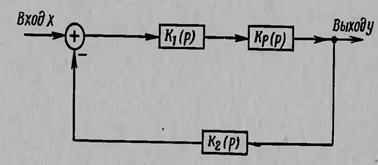
Рисунок. Упрощенная схема автопилота
Самонастройка может быть реализована различными способами:
1) настройкой параметра автопилота по заранее заданной программе;
2) изменением характеристик автопилота по данным измерения какого-либо критерия качества;
3) регулированием параметров автопилота в зависимости от внешних условий, влияющих на динамические характеристики ЛА.
Первый способ предполагает знание точных временных закономерностей условий полета (высоты, скорости) и параметров ракеты (массы, моментов инерции и др.), т.е. практическое движение должно происходить по заранее рассчитанной траектории. Для ЗУР этот способ неприемлем, так как условия встречи ракеты с целью могут быть самыми разнообразными и движение ракет происходит по несовпадающим траекториям. Более перспективными являются второй и третий способы. Реализация самонастройки по второму, адаптивному, способу предусматривает сохранение неизменным обоснованного критерия качества работы системы управления, или настройку на его экстремальное значение. По второму способу должно осуществляться сравнение текущих динамических характеристик системы управления с так называемыми эталонными. Для этого необходимо создать эталонную модель (ЭМ) процесса, под которую будет происходить непрерывная подстройка. Математическое описание ЭМ в этом случае должно соответствовать требуемым характеристикам контура управления при подключении модели к входу или контура, или ракеты. Выходные координаты системы и модели непрерывно поступают в сравнивающее устройство, где в результате сравнения определяется величина рассогласования и формируется сигнал настройки параметров автопилота в или .
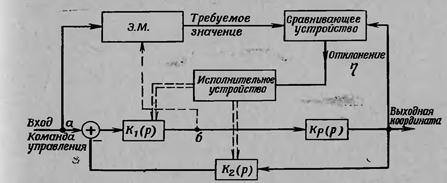
Рисунок. Самонастраивающаяся система с эталонной моделью
Другой вариант построения самонастраивающейся системы состоит в экстремальной настройке параметров так, чтобы выбранный критерий качества имел постоянно экстремальное значение. Такие системы как правило содержат устройства для поиска экстремума критерия качества – генератор поиска, который вводит так называемые пробные (зондирующие) сигналы.
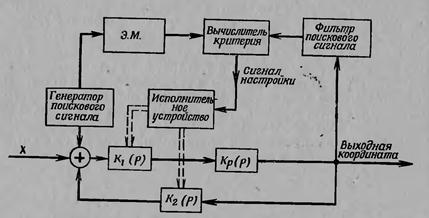
Рисунок. Самонастраивающуюся система с экстремальной настройкой
Качество переходного процесса, возникающее под действием этого сигнала, принимается за показатель экстремума и анализируется вычислителем критерия, в котором формируется закон настройки. Однако введение зондирующих сигналов будет вызывать колебание руля ракеты определенной амплитуды, что нежелательно.
Поэтому более перспективны беспоисковые экстремальные системы – аналитические с эталонной моделью.
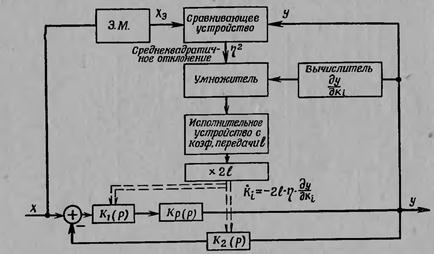
Рисунок. Аналитическая самонастраивающуюся система с эталонной моделью
Для них характерны высокое быстродействие и относительная простота приборной реализации. Формирование сигнала настройки производится по скорости регулирования параметра  в зависимости от отклонения величины
в зависимости от отклонения величины  с вычислением частной производной
с вычислением частной производной  по настраиваемому параметру.
по настраиваемому параметру.








