 2015-01-21
2015-01-21 475
475Процедура линеаризации аналогична пп. 2.8.2 и 2.8.3. Из выражения (2.49) определяются значения номинальных параметров, а аэродинамические коэффициенты определяем из графиков, представленных на рис. 2.34 – 2.37, построенных в зависимости от угла атаки и скольжения, которые равны  .
.
Далее определяются динамические силы в желаемом режиме:  ,
,  ,
,  , (2.185)
, (2.185)  .
.  .
.  .
.
Как и в предыдущем случае, будем полагать, что номинальные значения внешних неизмеряемых возмущений  равны нулю. Воздействия, обусловленные силой тяжести и силой Архимеда, определяются выражениями (2.27) – (2.29), которые в точке (2.168), (2.169) равны:
равны нулю. Воздействия, обусловленные силой тяжести и силой Архимеда, определяются выражениями (2.27) – (2.29), которые в точке (2.168), (2.169) равны:  . (2.186)
. (2.186)
Тогда вектор управляющих сил и моментов в установившемся режиме равен:  . (2.187)
. (2.187)
Тогда система уравнений, определяющая положение управляющих элементов в желаемом состоянии линзообразного дирижабля, равна: 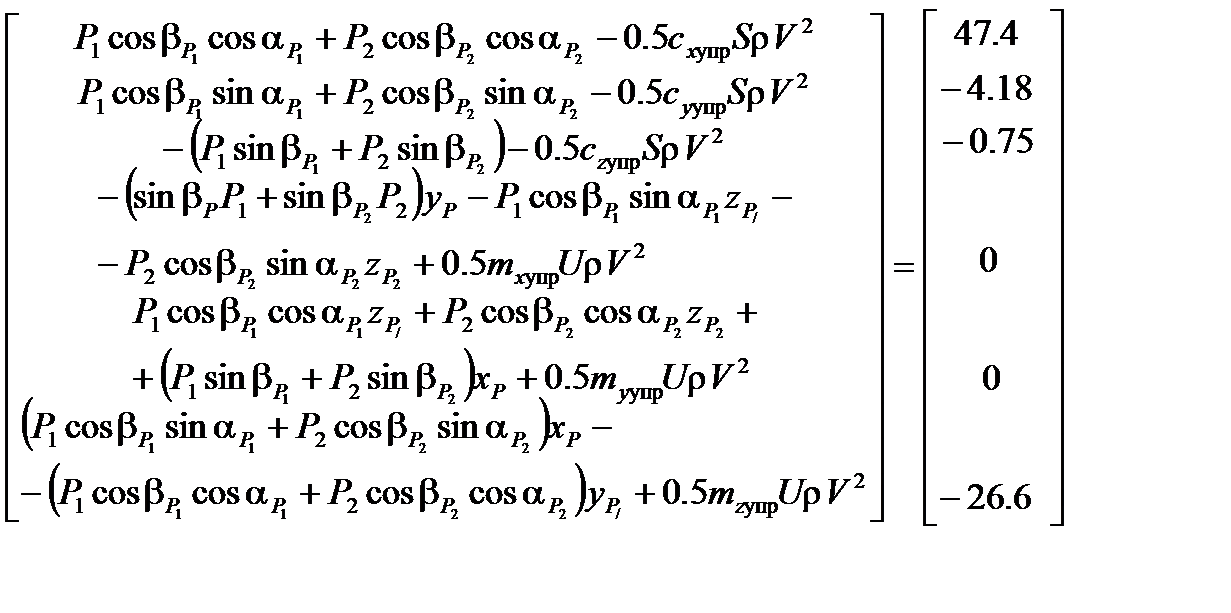 . (2.188)
. (2.188)
В аналитической форме зависимость аэродинамических коэффициентов  от положений аэродинамических рулей
от положений аэродинамических рулей  , получаются при симметричном отклонении рулей, т.е. при
, получаются при симметричном отклонении рулей, т.е. при  . Для заданного режима движения случае коэффициенты
. Для заданного режима движения случае коэффициенты  являются функцией одной переменной, а коэффициенты
являются функцией одной переменной, а коэффициенты  равны нулю. Выражения для , полученные по минимуму СКО при использовании квадратичных полиномов, представлены ниже.
равны нулю. Выражения для , полученные по минимуму СКО при использовании квадратичных полиномов, представлены ниже.
 . (2.189)
. (2.189)
 . (2.190)
. (2.190)  . (2.191)
. (2.191)
С учетом выражений 2.189 – 2.191 система (2.188) принимает вид: 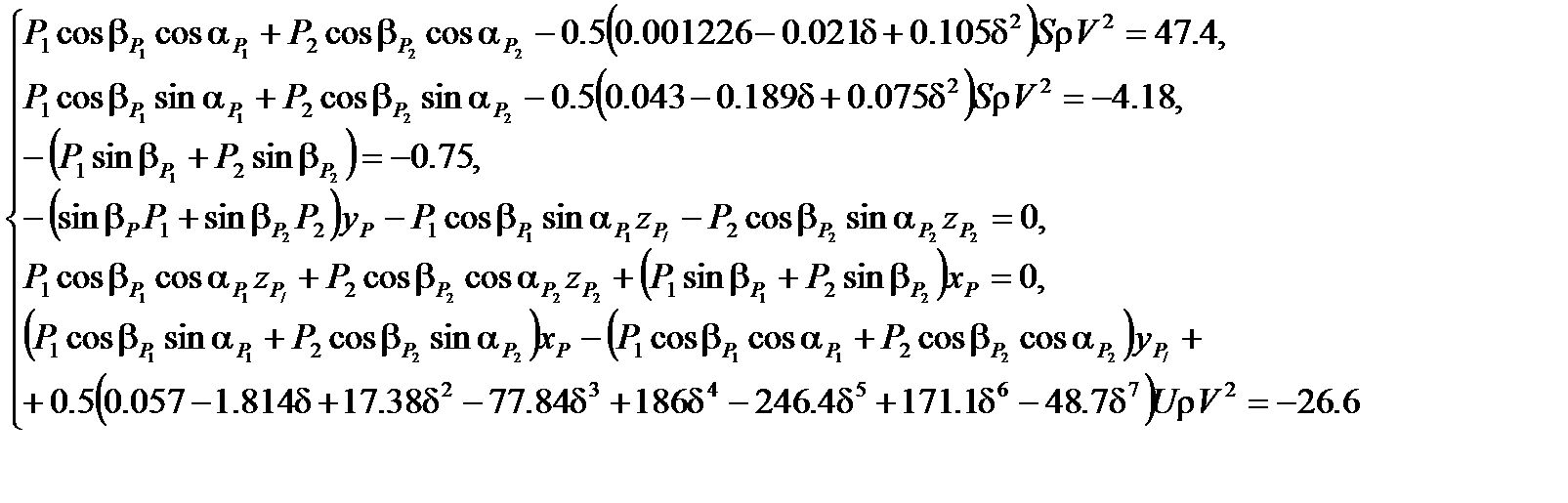 (2.192)
(2.192)
|
|
|
Решая систему (2.192), получаем значения управляющих сил и моментов в установившемся режиме: 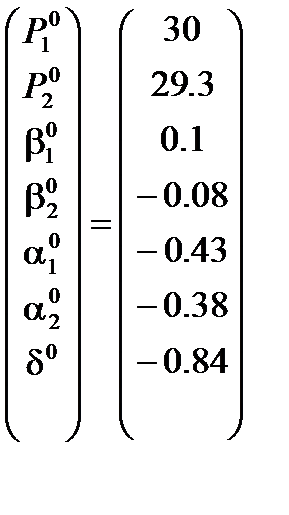 . (2.193)
. (2.193)
Теперь вычислим частные производные от правых частей (2.130) по переменным состояния в точке (2.204), (2.207). В результате получим выражения (2.131) – (2.133). Таким образом, линеаризованная система (2.130) принимает вид (2.134).
Аналогично дирижаблю сигарообразной формы в (2.6) примем обозначения (2.135) и линеаризуем уравнения (2.6), из которых получим систему, аналогичную (2.175).
В этом случае уравнения кинематики линзообразного дирижабля принимают вид (2.176), т.е. совпадают уравнениями кинематики дирижабля сигарообразной формы.
Теперь линеаризуем уравнения динамики дирижабля линзообразной формы относительно положения (2.204), (2.207). При этом рассматривается дирижабль с параметрами: радиус  , масса
, масса  , объем
, объем  .
.
Для данного дирижабля матрица массово-инерционных параметров  определяется следующим выражением
определяется следующим выражением
 . (2.194)
. (2.194)
Вектор динамических сил  , как и для дирижабля сигарообразной формы, определяется выражениями (2.50). Как и ранее, полагается, что
, как и для дирижабля сигарообразной формы, определяется выражениями (2.50). Как и ранее, полагается, что  . Производные
. Производные  вычисляются по таблицам аэродинамических коэффициентов в предположении, что
вычисляются по таблицам аэродинамических коэффициентов в предположении, что  , а зависимости
, а зависимости  определяются путем двумерной аппроксимации при заданной скорости
определяются путем двумерной аппроксимации при заданной скорости  . Результаты аппроксимации представлены в следующих выражениях и на рисунке 2.43.
. Результаты аппроксимации представлены в следующих выражениях и на рисунке 2.43.
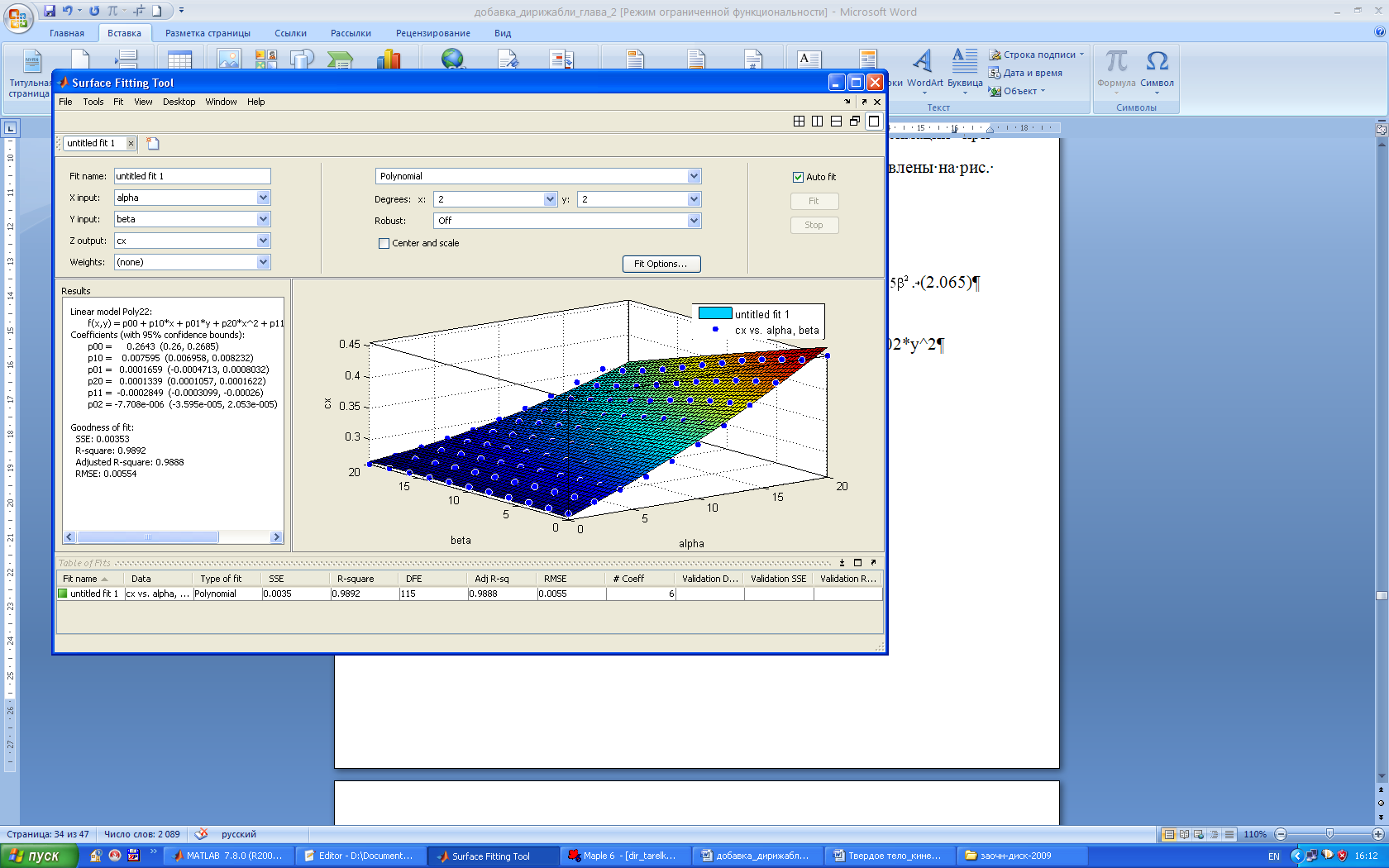
Рис. 2.43 – Аппроксимация коэффициента cx.
|
|
|
 . (2.195)
. (2.195)
 . (2.196)
. (2.196)
 . (2.197)
. (2.197)
 . (2.198)
. (2.198)
 . (2.199)
. (2.199)
 . (2.200)
. (2.200)
Вычисляем коэффициенты линейной модели для управляющих воздействий, используя выражения (2.193).
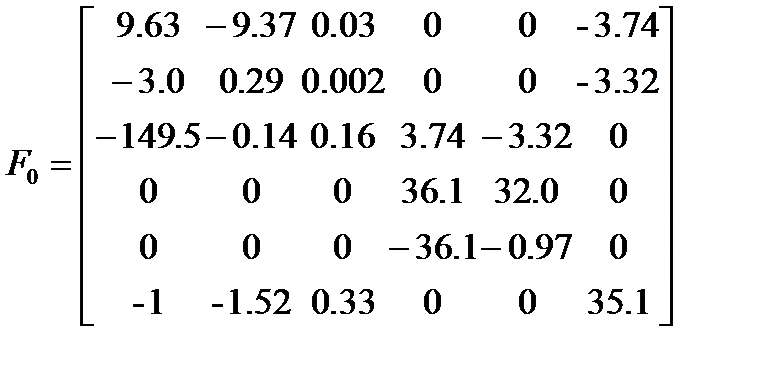
Тогда линеаризованные уравнения динамики (первое уравнение (2.48)) принимают вид:
 , (2.201)
, (2.201)
где 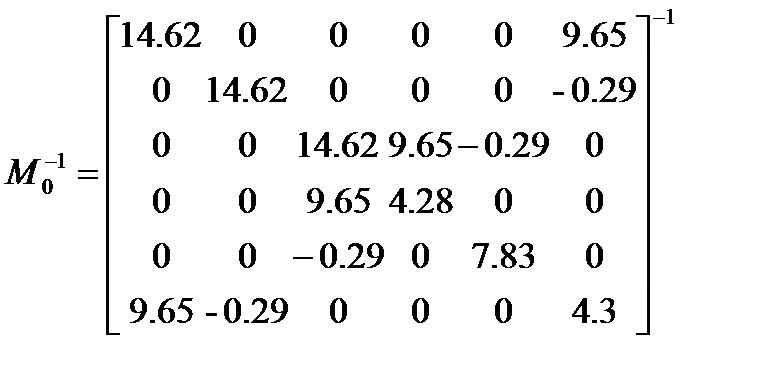 ,
,  ,
,  ,
,
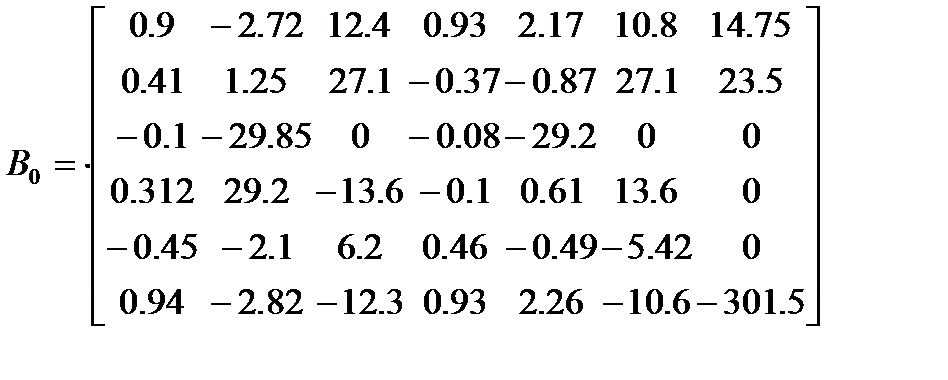 ,
, 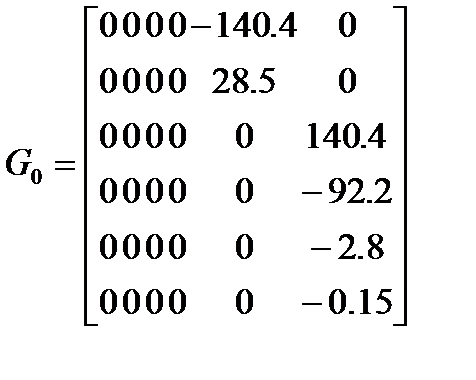 ,
,
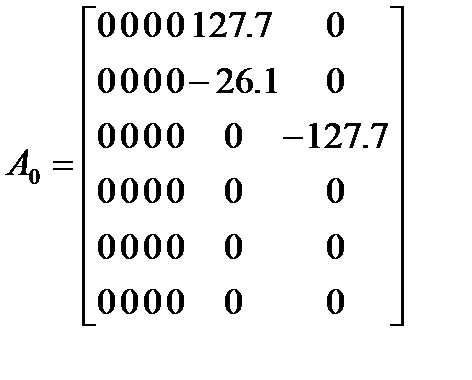 ,
, 
Таким образом, уравнения (2.201) и (2.176) представляют собой линеаризованные в уравнения дирижабля, движущегося по прямой линии.








