 2015-01-21
2015-01-21 583
583Рассмотрим пример составления линеаризованной модели дирижабля, движущегося вдоль прямой линии в вертикальной плоскости при постоянных скоростях, т.е.:
 . (2.159)
. (2.159)
Подставим (2.159) в уравнения кинематики общей модели дирижабля (2.48), в результате чего получим следующую систему:
 . (2.160)
. (2.160)
Из (2.160) получаем систему уравнений
 (2.161)
(2.161)
решая которую, находим значения скоростей в установившемся режиме
 . (2.162)
. (2.162)
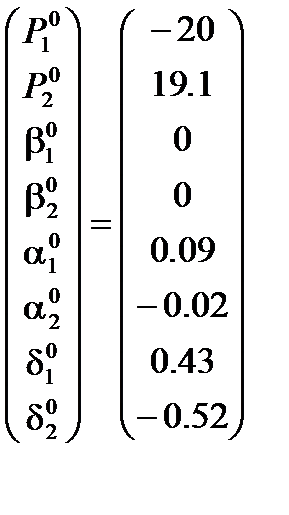
Теперь определим значения динамических сил в желаемом режиме движения дирижабля, которые, в отличие от случая, рассмотренного в предыдущем пункте, не равны нулю. Для этого в выражения (2.49) необходимо подставить значения номинальных параметров. При этом аэродинамические коэффициенты определяются из графиков, представленных на рис. 2.19 – 2.25, и построенных в зависимости от угла атаки и скольжения, которые для данного случая равны:
В этом случае динамические силы в желаемом режиме равны:
 ,
,
 ,
,
 , (2.163)
, (2.163)
 .
.
 .
.
 .
.
Как и в предыдущем случае, будем полагать, что номинальные значения внешних неизмеряемых возмущений  равны нулю. Воздействия, обусловленные силой тяжести и силой Архимеда, определяются выражениями (2.38) – (2.43), которые в точке (2.159), (2.162) равны:
равны нулю. Воздействия, обусловленные силой тяжести и силой Архимеда, определяются выражениями (2.38) – (2.43), которые в точке (2.159), (2.162) равны:
|
|
|
 . (2.164)
. (2.164)
Тогда вектор управляющих сил и моментов в установившемся режиме равен:
 . (2.165)
. (2.165)
Вектор управляющих сил и моментов можно разделить на создаваемый аэродинамическими управляющими поверхностями и определяемый движителями дирижабля. В этом случае система уравнений, определяющая положение управляющих элементов в желаемом состоянии дирижабля, равна:
 . (2.166)
. (2.166)
Чтобы получить в явном виде зависимости аэродинамических коэффициентов  от положений аэродинамических рулей
от положений аэродинамических рулей  , воспользуемся аппроксимацией графиков, представленных на рис. 2.28, полученной по минимуму СКО при использовании квадратичных полиномов для многомерной аппроксимации, осуществляемой посредством автоматизированной процедуры Surface Fitting Toll программного пакета Matlab.
, воспользуемся аппроксимацией графиков, представленных на рис. 2.28, полученной по минимуму СКО при использовании квадратичных полиномов для многомерной аппроксимации, осуществляемой посредством автоматизированной процедуры Surface Fitting Toll программного пакета Matlab.
 . (2.167)
. (2.167)
Аналогично вычисляются коэффициенты  ,
,  ,
,  ,
,  ,
,  .
.
 . (2.168)
. (2.168)
 . (2.169)
. (2.169)
 . (2.170)
. (2.170)
 . (2.171)
. (2.171)
 . (2.172)
. (2.172)
С учетом выражений 2.168 – 2.172 система (2.166) принимает вид:
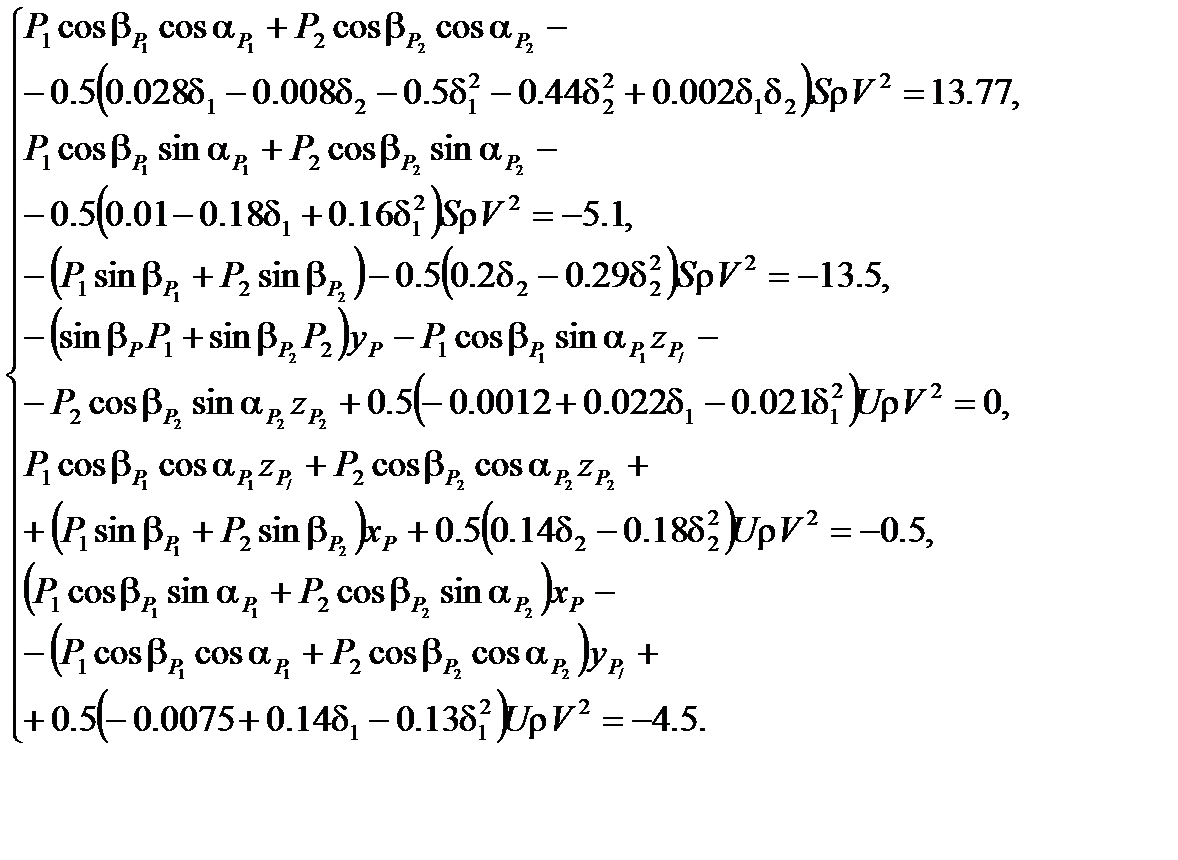 . (2.173)
. (2.173)
Решая систему (2.173), получаем значения управляющих сил и моментов в установившемся режиме:
 . (2.174)
. (2.174)
Теперь приступим непосредственно к линеаризации уравнений дирижабля. Вычислим частные производные от правых частей (2.120) по переменным состояния в точке (2.159), (2.162). В результате получим выражения, аналогичные равенствам (2.131) – (2.133).
Таким образом, линеаризованная система (2.18) принимает вид (2.133).
В (2.6) примем обозначения (2.135) и линеаризуем уравнения (2.6). В результате получим уравнение (2.6) в виде:
 . (2.175)
. (2.175)
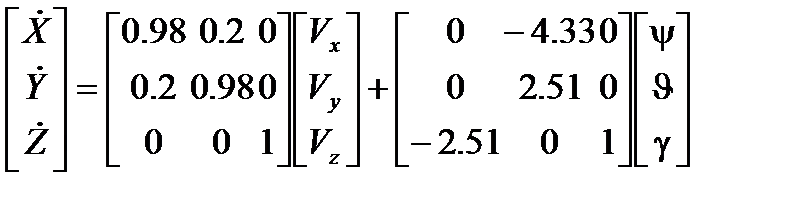
Тогда уравнения кинематики (второе уравнение модели дирижабля (2.48)) принимает вид:
|
|
|
 . (2.176)
. (2.176)
Теперь, аналогично рассмотренному ранее случаю, линеаризуем уравнения динамики дирижабля относительно положения (2.159), (2.162). При этом рассматривается дирижабль сигарообразной формы с параметрами, такими же, как и в предыдущем случае.
Для выбранного типа дирижабля матрица массо-инерционных параметров  определяется выражением (2.49).
определяется выражением (2.49).
Теперь рассмотрим функции, входящие в правые части уравнений динамики в (2.48). Вектор динамических сил  определяется выражениями (2.50) для точки (2.159), (2.162). При этом полагается, что
определяется выражениями (2.50) для точки (2.159), (2.162). При этом полагается, что  . Производные
. Производные  вычисляются по таблицам аэродинамических коэффициентов в предположении, что
вычисляются по таблицам аэродинамических коэффициентов в предположении, что  , а зависимости
, а зависимости  определяются путем двумерной аппроксимации при заданной скорости
определяются путем двумерной аппроксимации при заданной скорости  .
.
 . (2.177)
. (2.177)
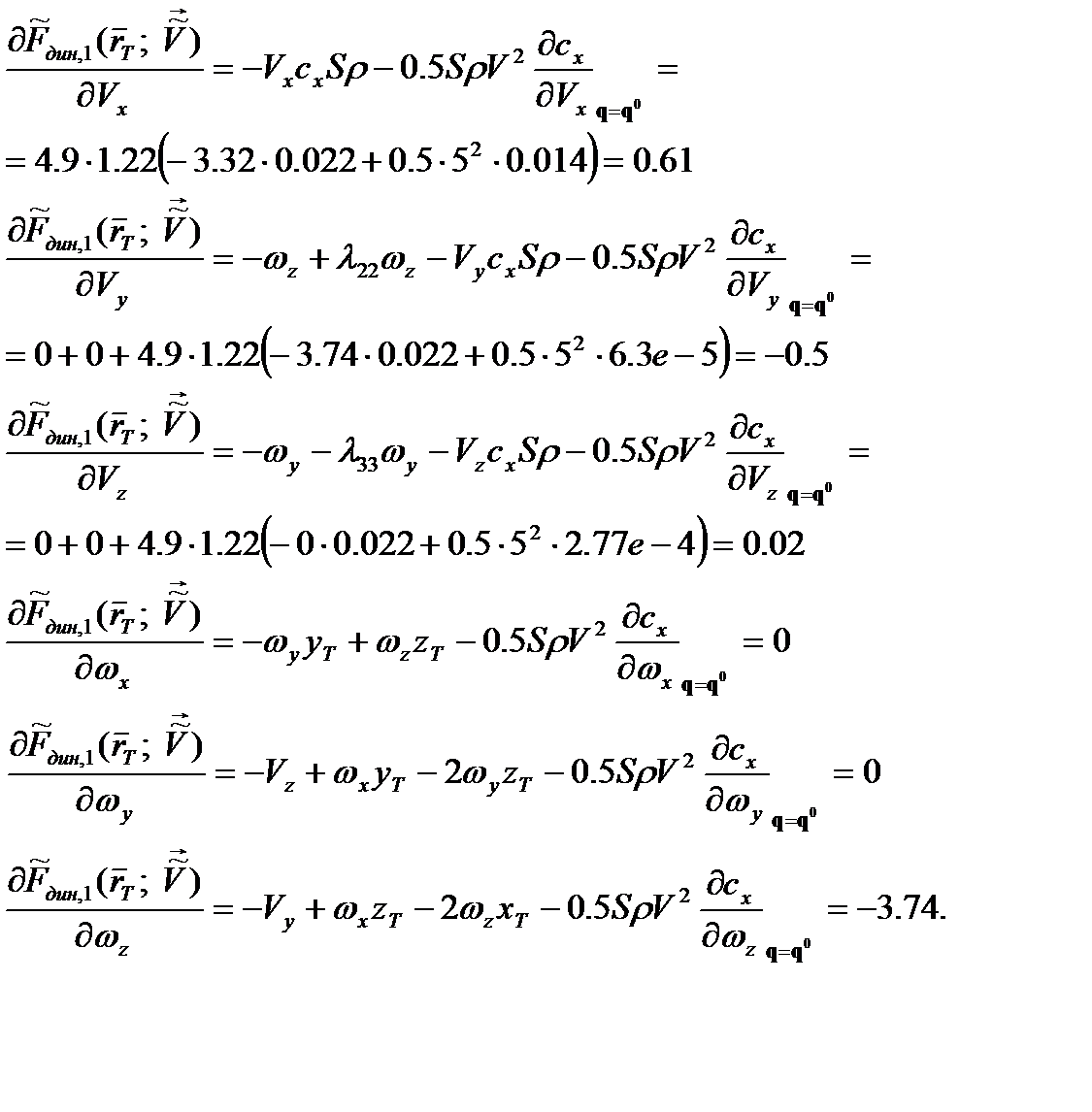 (2.178)
(2.178)
Аналогичным образом вычисляются коэффициенты  ,
,  ,
,  ,
,  ,
,  и определяются коэффициенты линеаризации сил
и определяются коэффициенты линеаризации сил  ,
,  ,
,  ,
,  ,
,  .
.
 . (2.179)
. (2.179)
 . (2.180)
. (2.180)
 . (2.181)
. (2.181)
 . (2.182)
. (2.182)
 . (2.183)
. (2.183)
Далее, аналогично предыдущему случаю, вычисляем коэффициенты линейной модели для управляющих воздействий. используя выражения (2.014). Вычисления здесь не приводятся.
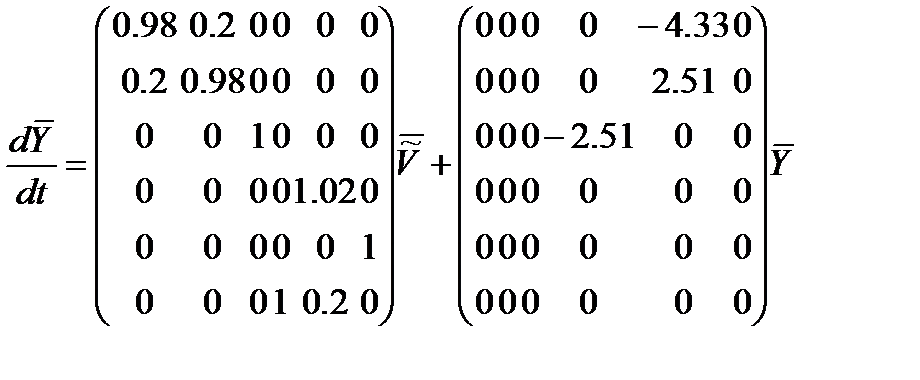
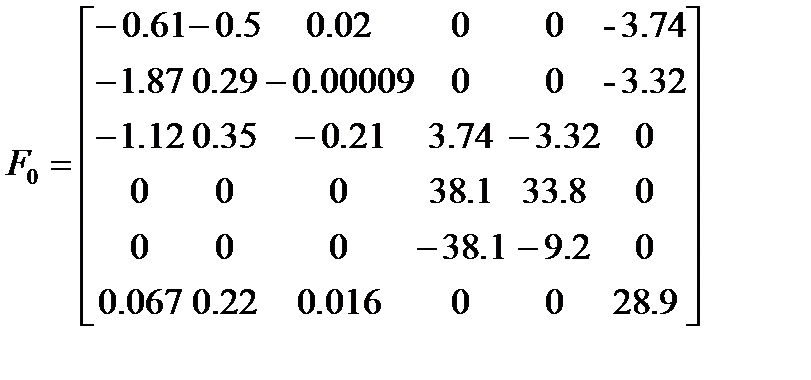
В результате линеаризованные уравнения динамики (первое уравнение (2.48)) имеют вид:
 , (2.184)
, (2.184)
где 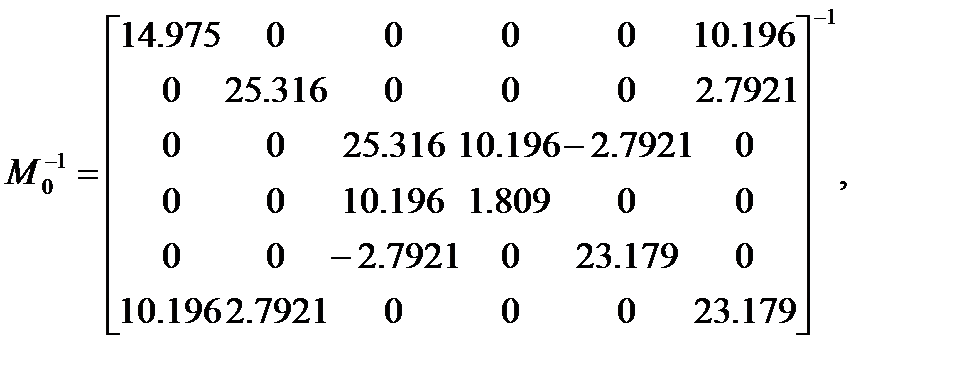
 ,
, 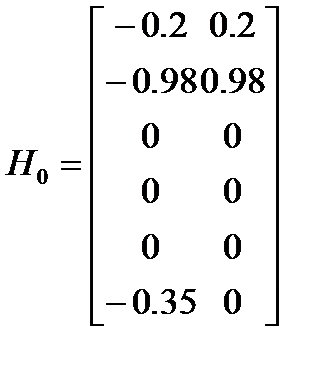 ,
,
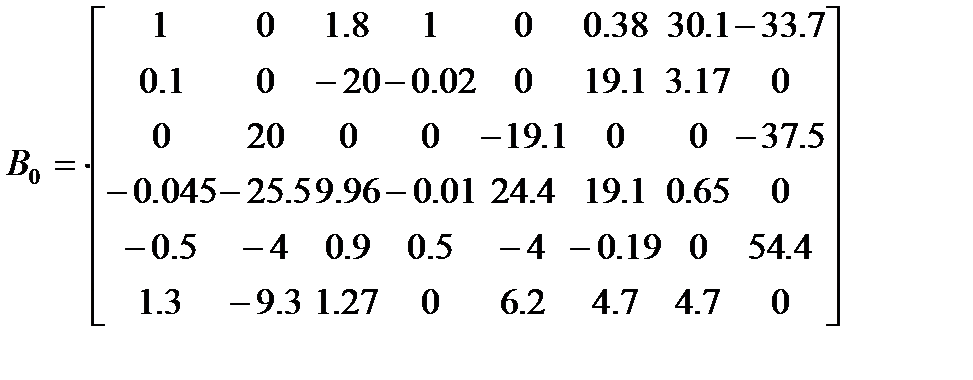 ,
, 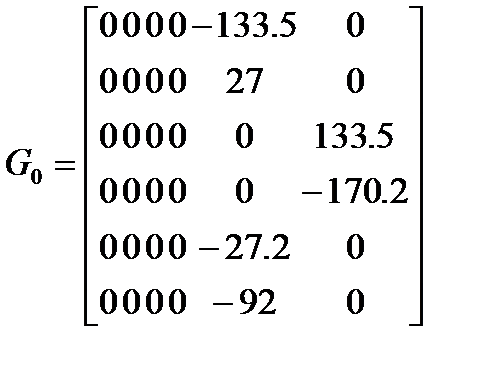 ,
,
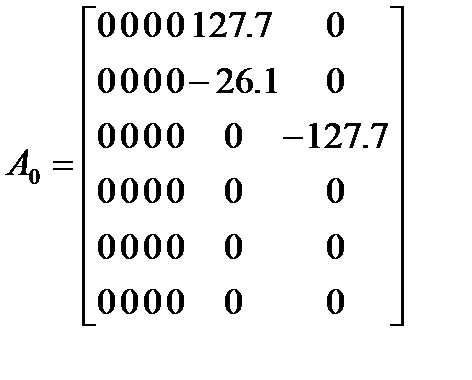 ,
, 
Таким образом, уравнения (2.176), (2.184) представляют собой линеаризованные в точке (2.168), (2.169), (2.174) уравнения дирижабля.








