 2015-02-24
2015-02-24 926
926Аналитическое исследование плоских механизмов удобнее всего вести методом векторных контуров, разработанных В.А. Зиновьевым.
В соответствии с этим методом нахождение кинематических характеристик механизма производится в следующем порядке:
1) Чертим в любом промежуточном положении структурную схему механизма.
2) Выбираем систему координат. (начало обычно связывают со стойкой начального звена).
3) Все звенья механизма, включая и стойку, заменяют векторами произвольного направления.
4) Полученные векторы объединяют между собой так, чтобы они образовывали замкнутые контуры. В каждый контур должно входить не более двух неизвестных величин.
5)Составляем векторные уравнения замкнутости полученных контуров в соответствии с выбранным направлением обхода.
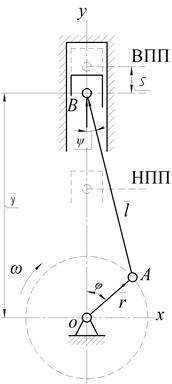
Рис. 4.3
Спроектировав эти уравнения на оси координат, получим базовые системы уравнений для расчета кинематических характеристик звеньев В качестве примера рассмотрим расчет центрального кривошипноползунного механизма Рис 4.3.
Ползун В перемещается за время одного полного поворота кривошипа ОА из высшего положения (ВПП) в низшее положение (НПП) и обратно. Ход ползуна от ВПП обозначен через S. Обозначив звенья механизма векторами ОА, АВ и ОВ, как показано на Рис 4.3, и задаваясь направлением обхода, составим уравнение замкнутости векторного контура ОАВ.
 (4.6)
(4.6)
Где r и l радиус кривошипа и длина шатуна соответственно.
Выбрав оси координат x и y, спроектируем это уравнение:
x:  (4.7)
(4.7)
y:  (4.8)
(4.8)
где неизвестными будут величина y и угол  .
.
Из треугольника ОАВ, по теореме синусов, получим:
 ,
,
Тогда
 .
.
Подставляя это выражение в (4.8) получим

Перемещение ползуна будет

Обозначая  и раскладывая корень в степенной ряд по
и раскладывая корень в степенной ряд по  , ограничиваясь первыми двумя членами разложения, можно получить
, ограничиваясь первыми двумя членами разложения, можно получить
 (4.9)
(4.9)
Скорость точки В найдем беря производную по времени от выражения для перемещения (4.9).

Или
 (4.10)
(4.10)
Для нахождения ускорения точки В возьмем производную от (4.10).
 (4.11)
(4.11)
Таким образом, применение аналитических методов анализа (синтеза) плоских механизмов позволяет выводить аналитические зависимости кинематических параметров звеньев и характерных точек механизма.








