 2015-02-27
2015-02-27 1793
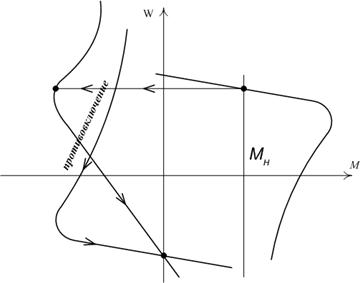
1793Для асинхронных двигателей возможны три режима торможения: рекуперативное торможение, динамическое торможение и торможение противовключением. Рекуперативное торможение происходит при увеличении частоты вращения ротора выше синхронной частоты вращения поля. Направление пересечения магнитных линий проводниками обмотки ротора при этом меняется на противоположное. Изменяется направление токов в проводниках ротора и направление электромагнитного момента, двигатель начинает работать в режиме генератора преобразуя механическую энергию в электрическую и отдавая ее в сеть. Увеличение частоты вращения выше синхронной возможно в электроприводах с регулируемой скоростью при переходе на пониженную частоту вращения, как это показано на рисунке.12.
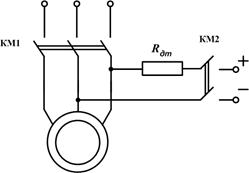
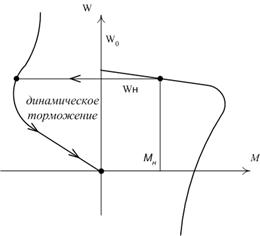
Динамическое торможение асинхронного двигателя осуществляется по схеме, приведенной на рисунке 7.13, а. Статор двигателя отключают от сети и подключают к источнику постоянного напряжения, ток которого создает магнитное поле машины при торможении. Для ограничения тока динамического торможения служит сопротивление  . Механические характеристики асинхронного двигателя при динамическом торможении показаны на рисунке 7.13, б.
. Механические характеристики асинхронного двигателя при динамическом торможении показаны на рисунке 7.13, б.
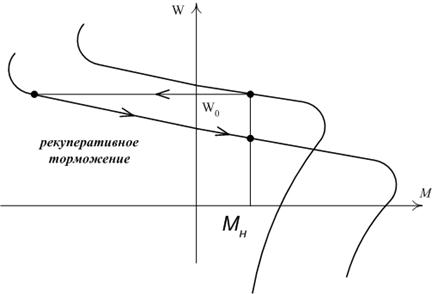
Рисунок 7.12 - Рекуперативное торможение асинхронного двигателя
а) б)
Рисунок 7.13 - Схема (а) и механические характеристики(б)
асинхронного двигателя при динамическом торможении
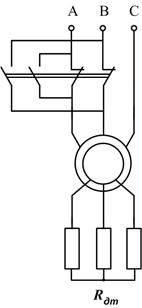
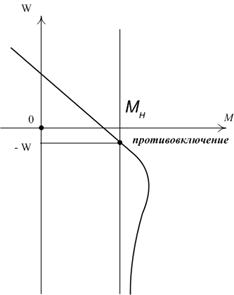
Торможение противовключением осуществляется реверсирование поля статора (изменение направления вращения) за счет изменения порядка чередования фаз питающей сети (рисунок 6=7.14, а). При этом ротор продолжает вращаться в направлении противоположном направлению вращения поля, создавая при этом тормозной момент (рисунок 7.14, б). Ток статора в этом режиме намного превышает номинальный, поэтому для его ограничения необходимо вводить в цепь ротора добавочное сопротивление. Такая возможность есть только у двигателей с фазным ротором. Поэтому применение способа торможения противовключением ограничено. Кроме реверса поля, торможение противовключением может быть достигнуто за счет введения большого добавочного сопротивления в цепь ротора, таким образом, что электромагнитный момент асинхронного двигателя становится равным моменту сопротивления только при скольжении больше единицы (w < 0). Этот режим применяется в электроприводе кранов и лебедок при спуске груза (рисунок 7.14, в).
а) б)
в)
Рисунок 7.14 - Схема (а), механические характеристики (б) и применение (в) при торможении асинхронного электродвигателя в режиме противовключения

