 2015-02-04
2015-02-04 1710
1710Цель работы: исследовать влияние периода дискретности на динамику систем.
Общие положения
К дискретным САУ относят импульсные и цифровые системы. Импульсные системы при квантовании по времени и амплитудно-импульсной модуляции (АИМ) относят к классу линейных. При цифровом управлении происходит квантование по времени и по уровню, что делает систему нелинейной. В большинстве случаев квантованием по уровню можно пренебречь и считать цифровую САУ линейной (если в непрерывной САУ нет нелинейных элементов). При квантовании по времени часть информации может теряться, восстановить непрерывный сигнал по его дискретным значениям можно только при выполнении условий теоремы Котельникова, определяющих требуемый период дискретности. Поэтому при проектировании дискретных систем важно правильно выбрать период дискретности, определяющий устойчивость и динамику системы. При выполнении условий теоремы Котельникова система ведет себя также, как непрерывная, описываемая с помощью непрерывного преобразования Лапласа.
Допустимое значение периода дискретности  можно выбрать по заданным требованиям к точности и скорости изменения ошибки (задающего воздействия, выходного сигнала системы):
можно выбрать по заданным требованиям к точности и скорости изменения ошибки (задающего воздействия, выходного сигнала системы):
 ,
,
где  – порядок астатизма системы;
– порядок астатизма системы;
 – максимальное значение
– максимальное значение  -ой производной от задающего воздействия
-ой производной от задающего воздействия  .
.
Для системы с астатизмом 1-го порядка ( ):
):
 ,
,
т.е. должно быть задано максимальное ускорение.
Если меняется по гармоническому закону  , то:
, то:
 ,
,
где  – частота входного воздействия.
– частота входного воздействия.
Если не заданы параметры изменения , то можно воспользоваться рекомендациями Циглера и Никольса:

где  – период собственных колебаний ОУ.
– период собственных колебаний ОУ.
Для того, чтобы период квантования мало сказывался на динамике системы с цифровым регулятором (УУ) рекомендуется период квантования выбирать по постоянной времени ОУ (она определяет скорость изменения сигнала на выходе системы, а следовательно и скорость изменения  ).
).
Выбор частоты дискретизации производится исходя из ширины полосы пропускания системы из времени регулирования. Частоты дискретизации в  больше ширины полосы пропускания или от 2-х до 4-х дискретных отсчетов за время нарастания сигнала на выходе системы, в противном случае качество САУ резко ухудшается.
больше ширины полосы пропускания или от 2-х до 4-х дискретных отсчетов за время нарастания сигнала на выходе системы, в противном случае качество САУ резко ухудшается.
Структурная схема импульсной линейной системы имеет следующий вид:
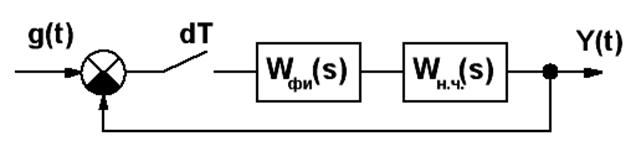
Рисунок 6.1 – Структура импульсной системы
 – передаточная функция формирователя импульсов;
– передаточная функция формирователя импульсов;
 – экстраполятор нулевого порядка;
– экстраполятор нулевого порядка;
 – передаточная функция непрерывной части системы.
– передаточная функция непрерывной части системы.
При расчете переходных процессов и качества системы используют  –преобразование, следовательно, надо записать
–преобразование, следовательно, надо записать  и
и  . По – изображению выходного сигнала можно рассчитать значение выходного сигнала в дискретные моменты времени
. По – изображению выходного сигнала можно рассчитать значение выходного сигнала в дискретные моменты времени  . Таким образом аналитический расчет – переходного процесса в некоторой фиктивной системы с ключом на входе выходе, работающем синхронно. В реальной же системе выходной сигнал аналоговый.
. Таким образом аналитический расчет – переходного процесса в некоторой фиктивной системы с ключом на входе выходе, работающем синхронно. В реальной же системе выходной сигнал аналоговый.
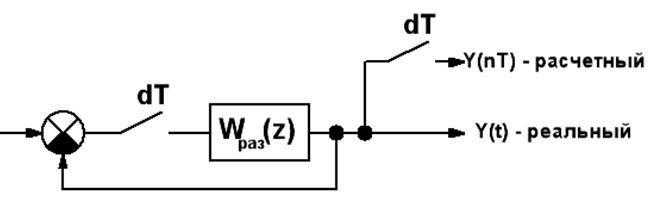
Рисунок 6.2 – Структура импульсной системы
Передаточная функция приведенной непрерывной части:
 .
.
Для перехода в – форму используются следующие соотношения:

 – изображение переходной функции
– изображение переходной функции  .
.
Таким образом необходимо записать выражение и взять от него – преобразование.
Например: 

 (по таблице в приложении).
(по таблице в приложении).
Можно воспользоваться таблицами перехода от  –преобразования к
–преобразования к  –преобразованию, для этого надо разложить на элементарные дроби, т.е. преобразовать к параллельной структуре. Тогда на каждое простейшее звено сигнал будет поступать с квантователя (что требуется при использовании таблиц, если они не полные).
–преобразованию, для этого надо разложить на элементарные дроби, т.е. преобразовать к параллельной структуре. Тогда на каждое простейшее звено сигнал будет поступать с квантователя (что требуется при использовании таблиц, если они не полные).
Например:  ;
;  .
.
Можно выполнить конверсию  в программе VisSim.
в программе VisSim.
Особенности моделирования дискретных систем
1. Преобразование линейной функции в Z-форму.
Пакет динамического моделирования VisSim 3.0 имеет возможность автоматически выполнить Z-преобразование линейной функции. Для этого необходимо из закладки «Blocks» выбрать палитру «Linear System» блок «transferFunction».
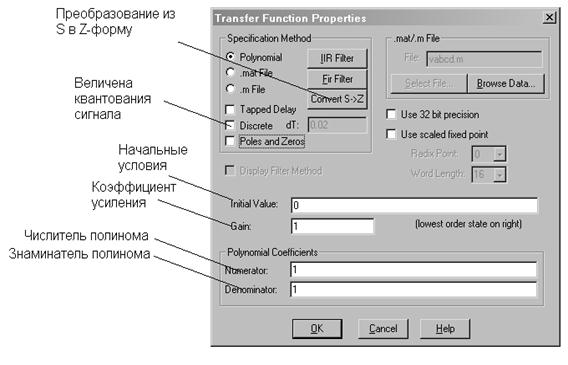
Рисунок 6.3 – Окно параметров блока «transferFunction»
В позиции «Numerator» и «Denominator» вводит числитель и знаменатель полинома линейной функции соответственно, используя следующие правила:
1. Вводятся через пробел постоянные времени, по степени убывания степеней их операторов.
2. Степень полинома числителя должна быть меньше степени знаменателя
После необходимо нажать кнопку «Convert S->Z» и указать время квантования. Z-преобразование функции будет произведено по следующим правилам:
В VisSim 3.0 любая функция в изображения задается в таком виде:  , где k – коэффициент усиления звена,
, где k – коэффициент усиления звена,  - постоянные времени числителя,
- постоянные времени числителя,  - постоянные времени знаменателя. Оператору s присваивают значение
- постоянные времени знаменателя. Оператору s присваивают значение  , где dT - период дискретности, и подставляют в передаточную W(s). После программа выполнитупрощение функции. Если есть возможность упростить выражение на какую-либо константу, то программа выполнит эту операцию. Сама константа поместиться в раздел Gain, то есть станет коэффициентом усиления.
, где dT - период дискретности, и подставляют в передаточную W(s). После программа выполнитупрощение функции. Если есть возможность упростить выражение на какую-либо константу, то программа выполнит эту операцию. Сама константа поместиться в раздел Gain, то есть станет коэффициентом усиления.
2. Прямая запись передаточной функции в Z-форме.
Для записи функции в Z-форме необходимо поставить галочку в позицию «Discrete», и указать время квантования. Все дальнейшая запись функции такая, как и для линейных функций.
Примечание: Все элементы в z-форме, действующие в одной модели САУ, должны иметь одинаковый период дискретности.
Пример моделирования системы, передаточная функция которой задана в непрерывной форме
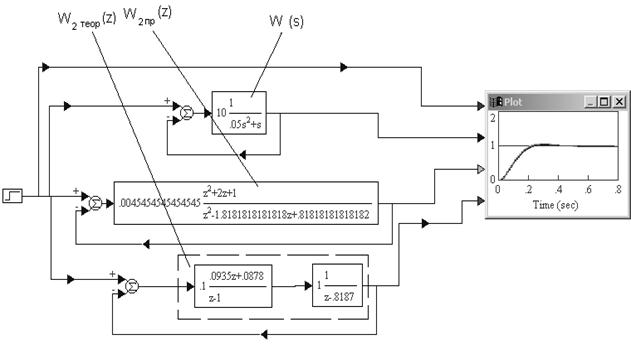
Рисунок 6.4 – Модель системы
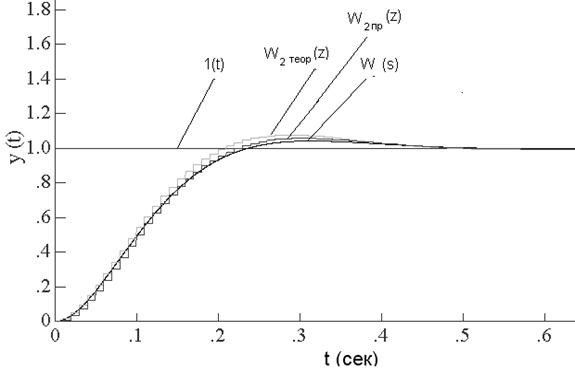
Рисунок 6.5 – Переходные характеристики
Собрать структурные схемы:
а) непрерывной системе
б) импульсной системы, передаточная функция которой определена с учетом выбранного периода дискретности аналитически.
в) импульсной системы, передаточная функция которой получена с учетом выбранного периода дискретности в программе VisSim.
Исследовать правильность выбора периода дискретности.
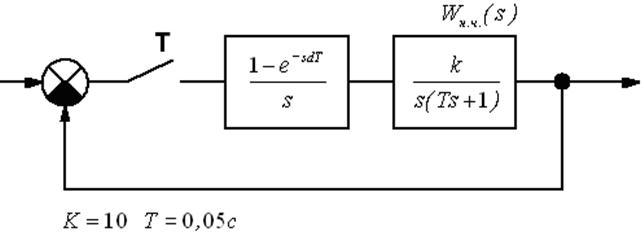
Рисунок 6.6 – Структурная схема
Требуемый период дискретности  .
.
а) моделируем систему при  и сравниваем графики ,
и сравниваем графики ,  и
и  .
.
б) моделируем систему при  и сравниваем графики , и .
и сравниваем графики , и .

