 2015-02-04
2015-02-04 1520
1520Изучение методов теории инвариантности для повышения точности систем
Цель работы: изучить методы теории инвариантности для повышения точности систем.
Общие положения
Одним из наиболее эффективных способов повышения точности следящих систем является применение методов теории инвариантности. В общем случае инвариантность системы по какому-либо воздействию – это независимость выходной переменной системы от этого воздействия. Применение методов теории инвариантности наиболее эффективно в тех случаях, когда к следящим системам предъявляются высокие требования в отношении динамической точности.
Основным методом, используемым при построении инвариантных систем, является введения второго канала передачи воздействия, по которому требуется обеспечить инвариантность. Следящие системы, в которых вводится второй канал передачи задающего воздействия также называют системами с комбинированным управлением, потому что в таких системах управление осуществляется как сигналом ошибки, так и сигналом задающего воздействия.
При необходимости получения абсолютной (полной) инвариантности системы по какому-либо воздействию передаточные функции устройств, которые необходимо вводить во второй канал передачи, определяются из условия равенства нулю ошибки по этому воздействию. Однако при этом часто получаются передаточные функции компенсирующей цепи, содержащие производные высоких порядков. Поскольку реализовать такие передаточные функции практически не удается, поэтому чаще всего ограничиваются выполнением условий частичной инвариантности, т.е. обеспечивают инвариантность системы к определенным составляющим воздействий. На практике обычно ограничиваются введением в компенсирующую цепь производных не выше второго или третьего порядка. В большинстве случаев этого бывает достаточно для обеспечения высокой точности системы.
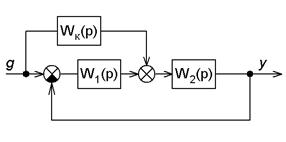
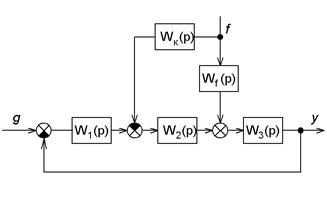
Рассмотрим пример систем с комбинированным управлением. Структурные схемы следящих систем с таким управлением приведены на рисунке 7.1.
 |  |
| а | б |
Рисунок 7.1 – Структурные схемы систем с комбинированным управлением
Теоретически может быть рассчитана такая передаточная функция компенсирующей цепи  , при введении которой можно получить абсолютную инвариантность системы как по входному сигналу, так и по возмущению, т. е. абсолютно точную систему, в которой ошибка равна нулю и не зависит от входного сигнала и возмущения.
, при введении которой можно получить абсолютную инвариантность системы как по входному сигналу, так и по возмущению, т. е. абсолютно точную систему, в которой ошибка равна нулю и не зависит от входного сигнала и возмущения.
В следящей системе с комбинированным управлением по входному сигналу (рисунок 7.1, а) передаточная функция компенсирующей цепи находится из условия равенства нулю передаточной функции по ошибке:
 (1)
(1)
Передаточная функция замкнутой системы  в этом случае будет тождественно равна единице:
в этом случае будет тождественно равна единице:
 .
.
Условие (1) является условием абсолютной (полной) инвариантности следящей системы по входному сигналу.
В следящей системе с комбинированным управлением по возмущению (рисунок 7.1, б) условием полной инвариантности является равенство  .
.
В схеме, приведенной на рисунке 7.1, б, при выполнении условия (2) сигналы на выходе  и
и  , обусловленные возмущением, будут равны, а их разность (на входе
, обусловленные возмущением, будут равны, а их разность (на входе  ) равна нулю, т. е. действия возмущения по цепям и
) равна нулю, т. е. действия возмущения по цепям и  взаимно компенсируются.
взаимно компенсируются.
Особенностью следящих систем с комбинированным управлением является то, что компенсирующие цепи при выполнении условий (1) и (2) не изменяют характеристическое уравнение замкнутой системы, а следовательно, не влияют на устойчивость.
Реализация принципа комбинированного управления позволяет компенсировать ошибки, обусловленные действием входного сигнала и возмущения, но не устраняет переходную составляющую ошибки, обусловленную ненулевыми начальными условиями.
Условия абсолютной инвариантности (1) и (2) получить на практике в большинстве случаев не удается из-за физической нереализуемости требуемых передаточных функций компенсирующих цепей, представляющих собой дроби, у которых порядок числителя больше порядка знаменателя. Приближенная реализация условий (1) и (2) позволяет получить частичную инвариантность (инвариантность до ε). При этом повышается порядок астатизма системы и она становится инвариантной (не имеет ошибки) к определенным типам воздействий.
Рассмотрим возможность компенсации ошибки на примере системы с комбинированным управлением по входному сигналу (рисунок 7.1, а). Предположим, что передаточная функция этой части содержит интегратор и несколько инерционных звеньев:
 ,
,
где  ;
;  ;
;  ;…
;…
Для выполнения условия инвариантности (2) передаточная функция компенсирующей цепи получается:
 , (3)
, (3)
где  ;
;  ;
;  ;…
;…
На выходе компенсирующей цепи формируется сигнал, пропорциональный производным входного сигнала, число которых определяется порядком знаменателя  .
.
Реализовать компенсирующую цепь с передаточной функцией вида (3) практически не удается. При этом практически реализуемая передаточная функция компенсирующей цепи получается в виде
Наличие паразитной постоянной времени  в передаточной функции
в передаточной функции  влияет на условия компенсации ошибки, а также на характеристическое уравнение замкнутой системы. Поэтому на практике необходимо, чтобы была как можно меньше.
влияет на условия компенсации ошибки, а также на характеристическое уравнение замкнутой системы. Поэтому на практике необходимо, чтобы была как можно меньше.
На практике обычно ограничиваются двумя-тремя производными из-за сложности реализации и настройки компенсирующей цепи. Хотя полная инвариантность при этом не достигается, но повышается астатизм системы на два-три порядка, причем без заметного ухудшения устойчивости.
Порядок выполнения лабораторной работы
1.1 Для схемы на рисунке 7.1,а принять  и
и  . Записать для данной схемы условие полной инвариантности по задающему воздействию и найти
. Записать для данной схемы условие полной инвариантности по задающему воздействию и найти  .
.
1.2 Собрать схему рисунка 7.1, а в программе VisSim без компенсирующей цепи при подаче на вход системы синусоидального сигнала.
1.3 Собрать схему рисунка 1,а в программе VisSim с компенсирующей цепью , обеспечивающей полную инвариантность по задающему воздействию, при подаче на вход системы синусоидального сигнала, сделать выводы о влиянии компенсирующей цепи.
2.1 Для схемы на рисунке 7.1, б принять 
 . Записать для данной схемы условие полной инвариантности по возмущающему воздействию и найти
. Записать для данной схемы условие полной инвариантности по возмущающему воздействию и найти  .
.
2.2 Собрать схему в программе VisSim без компенсирующей цепи при подаче на вход системы ступенчатого сигнала, а в качестве возмущающего воздействия задать  .
.
2.3 Ввести , обеспечивающую полную инвариантность системы по возмущению, сделать выводы о влиянии компенсирующей цепи.
Содержание отчёта
1. Схемы исследования и результаты исследования.
2. Передаточные функции компенсирующих цепей, их вывод.
3. Выводы о влиянии компенсирующих цепей.
Контрольные вопросы
1. Что такое полная и частичная инвариантность? За счет чего она обеспечивается?
2. Исходя из каких условий выбирают передаточные функции компенсирующих цепей?
3. Если обеспечивается полная инвариантность системы, влияют ли компенсирующие цепи на устойчивость?
Приложение – Таблица преобразований Лапласа
| F (p) | f (t) |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
Литература
1. Теория автоматического управления: учебник для вузов / Л. С. Гольдфарб [и др.]; под ред. А. В. Нетушила. – 2-е изд. перераб. и доп. – Москва: Высшая школа, 1983. – 432 с.
2. Автоматическое регулирование. Теория и элементы систем: учебник для вузов / под ред. Н. Н. Иващенко – 3-е изд. – Москва: Машиностроение, 1973. – 606 с.
3. Анхимюк, В. Л. Теория автоматического управления: учеб. пособие для вузов / В. Л. Анхимюк, О. Ф. Опейко, Н. Н. Михеев – Минск: Дизайн ПРО, 2000. – 352 с.
4. Бесекерский, В. А., Теория автоматического регулирования / В. А. Бесекерский, Е. П. Попов. изд. 3-е, испр. – Москва: Наука, 1975. – 768 с
5. Куропаткин, А. В. Теория автоматического управления: учеб. пособие для электротехн. спец. вузов / А. В. Куропаткин; под ред. Д. В. Васильева. – Москва: Высшая школа, 1973. – 528 с.
6. Справочное пособие по теории систем автоматического регулирования и управления / под общ. ред. Е. А. Санковского. – Минск: Высшая школа, 1973. – 583 с.
7. Топчеев, Ю. И. Атлас для проектирования систем автоматического регулирования: учеб. пособие для вузов / Ю. И. Топчеев. – Москва: Машиностроение, 1989. – 752 с.
8. Микропроцессорные автоматические системы регулирования. Основы теории и элементы: учеб. пособие / В. В. Солодовников [и др.]; под ред. В. В. Солодовникова. – Москва: Высшая школа, 1991. – 256 с.
9. Руководство по проектированию систем автоматического управления: учеб. пособие для студентов специальности «Автоматика и теле- механика» / под ред. В. А. Бесекерского. – Москва: Высшая школа, 1983. – 296 с.
10. Кулаков, Г. Е. Анализ и синтез систем автоматического регулирования / Г. Е. Кулаков. – Минск: УП Технопринт, 2003. – 125 с.
11. Лазарева, Т. Я. Основы теории автоматического управления: учеб. пособие / Т. Я. Лазарева, Ю. Ф. Мартемьянов. – Тамбов: Изд-во Тамбовского государственного технологического университета, 2003. – 308 с.
12. Андриевский, Б. Р. Избранные главы теории автоматического управления с примерами на языке Matlab / Б. Р. Андриевский, А. Л. Фрадков. – Санкт-Петербург: Наука, 2000. – 475 с.
13. Клиначев, Н. В. Теория систем автоматического регулирования. Учебно-методический комплекс, 2005. Электронный ресурс.

