 2015-04-01
2015-04-01 583
583Реализацию математической модели маневрирующего судна целесообразно осуществлять по разветвленной схеме, как это показано на рисунке 2.19.
Основная часть программы управляет перекладкой рулей, назначает режим работы двигателей, вычисляет кинематические параметры потоков воды и ветра, осуществляет интегрирование системы дифференциальных уравнений и вывод результатов расчета на экран и в файлы длительного хранения для последующей обработки и оформления. Ветви же программы занимаются определением отдельных категорий внешних сил на корпусе и элементах ДРК.
Схема реализации математической модели
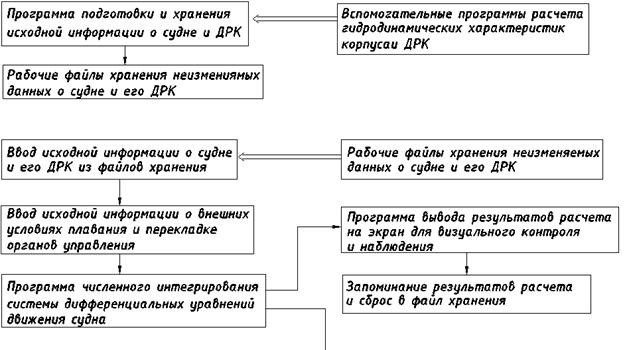
Рис. 2.19. Укрупненная блок-схема программного комплекса расчета
управляемости судна на ПЭВМ,








