 2015-04-01
2015-04-01 905
905При маневрировании судна непрерывно изменяются параметры его движения:  . Вследствие этого будут изменяться и условия работы ГВ: относительная поступь и угол скоса потока, натекающего на движитель. Поэтому будут изменяться упор ГВ и его гидродинамический момент.
. Вследствие этого будут изменяться и условия работы ГВ: относительная поступь и угол скоса потока, натекающего на движитель. Поэтому будут изменяться упор ГВ и его гидродинамический момент.
Гребной винт приводится во вращение двигателем, имеющим определенные ограничения по мощности и скорости вращения. Эти ограничения реализуют регулятор двигателя, который управляет величиной подачи топлива в двигатель топливным насосом, и рукоятка управления двигателем, задающая определенный режим работы двигателя и находящаяся в рулевой рубке в распоряжении судоводителя. Все действия регулятора двигателя и судоводителя путем перемещения рукоятки управления сводятся к установлению величины движущего момента двигателя в зависимости от частоты его вращения.
Зависимость движущего момента от положения рукоятки управления двигателя  и частоты вращения
и частоты вращения  называется внешней характеристикой системы: ДВИГАТЕЛЬ-РЕГУЛЯТОР-РУКОЯТКА УПРАВЛЕНИЯ
называется внешней характеристикой системы: ДВИГАТЕЛЬ-РЕГУЛЯТОР-РУКОЯТКА УПРАВЛЕНИЯ  . Гребной винт является потребителем энергии и между ним и двигателем должно выполняться соответствие выделяемой и потребляемой мощностями.
. Гребной винт является потребителем энергии и между ним и двигателем должно выполняться соответствие выделяемой и потребляемой мощностями.
Рассмотрим принципиальную схему комплекса РУКОЯТКА УПРАВЛЕНИЯ - РЕГУЛЯТОР - ДВИГАТЕЛЬ - ГРЕБНОЙ ВАЛ - ГРЕБНОЙ ВИНТ, показанную на рисунке 2.17.
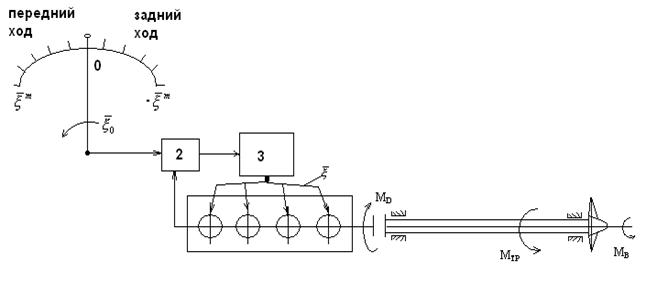
Рис. 2.17. Функциональная схема комплекса: 1- рукоятка управления; 2- регулятор; 3- топливный насос; 4- двигатель; 5- гребной вал;
6- гребной винт.
Обозначим:
 - относительное положение рукоятки управления двигателем, соответствующее относительной подаче топлива в двигатель при его работе по номинальной винтовой характеристике при движении судна прямым курсом на тихой и глубокой воде ( =1.0 - "полный ход", = 0.75 - "средний ход", = 0.50 -"малый ход"; + - "перений ход", - - "задний ход");
- относительное положение рукоятки управления двигателем, соответствующее относительной подаче топлива в двигатель при его работе по номинальной винтовой характеристике при движении судна прямым курсом на тихой и глубокой воде ( =1.0 - "полный ход", = 0.75 - "средний ход", = 0.50 -"малый ход"; + - "перений ход", - - "задний ход");
 - максимальная относительная подача топлива в двигатель при постановке рейки топливного насоса на упор ( =1.10 - паспортные данные двигателя);
- максимальная относительная подача топлива в двигатель при постановке рейки топливного насоса на упор ( =1.10 - паспортные данные двигателя);
 - относительная текущая подача топлива в двигатель.
- относительная текущая подача топлива в двигатель.
Судовые дизели с передачей на гребной винт оборудуются так называемыми всережимным либо предельным регуляторами. Действие регуляторов на изменение нагрузки на гребном винте и фиксированном положении рукоятки управления различно. Всережимный регулятор будет стремиться сохранить прежнюю частоту вращения вала двигателя путем увеличения подачи топлива вплоть до максимальной. Предельный же регулятор не оказывает воздействия на двигатель, который за счет саморегулирования будет изменять частоту вращения вала до момента соответствия моментов: движущего двигателя и гидродинамического гребного винта. Оба регулятора реагируют одинаково, уменьшая подачу топлива в двигатель, при превышении частоты вращения вала предельно допустимой  = (1.02 - 1.03)
= (1.02 - 1.03)  .
.
В практике расчетов управляемости судов, имеющих в силовой установке среднеоборотные дизели, используются предложенные В.И. Небесновым / 7 / безразмерные (относительные) внешние характеристики:
 ,
,
показанные на графиках рисунка 2.18.
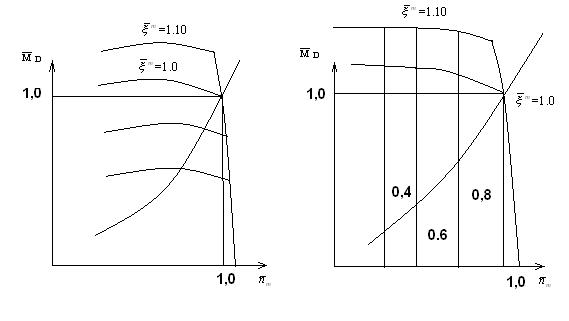
Рис. 2.18. Относительные внешние характеристики двигателей:
а) Предельный регулятор; б) Всережимный регулятор.
Переходные процессы в части комплекса РУКОЯТКА УПРАВЛЕНИЯ-РЕГУЛЯТОР-ДВИГАТЕЛЬ происходят со значительно большими скоростями, нежели скорости изменения параметров движения корпуса судна, поэтому для задач управляемости, чтобы не усложнять задачу, ими пренебрегают, т.е. считают происходящими мгновенно с малой задержкой во времени от начала перекладки рукоятки управления.
Переходные же процессы в механической части комплекса ДВИГАТЕЛЬ-ГРЕБНОЙ ВАЛ-ДВИЖИТЕЛЬ из-за инерционности происходят медленнее и описываются дифференциальным уравнением:
 , (2.72)
, (2.72)
в котором:  - приведенный к гребному валу момент инерции масс подвижных звеньев двигателя, гребного вала и движителя, определяемые специальным расчетом.
- приведенный к гребному валу момент инерции масс подвижных звеньев двигателя, гребного вала и движителя, определяемые специальным расчетом.
Момент инерции гребного винта может быть определен по приближенной формуле Кутузова / 2 /:
 , (2.73)
, (2.73)
в которой:  - плотность материала ГВ, а
- плотность материала ГВ, а  - дисковое отношение;
- дисковое отношение;  - присоединенный момент инерции воды движителя, который для гребного винта может быть определен по эмпирической формуле Л.Б. Сандлера / 2 /:
- присоединенный момент инерции воды движителя, который для гребного винта может быть определен по эмпирической формуле Л.Б. Сандлера / 2 /:
 , (2.74)
, (2.74)
где: H/D - шаговое отношение; Z - число лопастей;  - диаметр винта;
- диаметр винта;
 - момент трения в подшипниках валопровода.
- момент трения в подшипниках валопровода.
В задачах управляемости удобнее дифференциальное уравнение движения комплекса ДВИГАТЕЛЬ - ГРЕБНОЙ ВАЛ - ДВИЖИТЕЛЬ привести к безразмерному виду:
 (2.75)
(2.75)
В уравнении (2.75) m0- коэффициент, определяемый по формуле:
 ; (2.76)
; (2.76)
 - относительный движущий момент, подведенный к движителю:
- относительный движущий момент, подведенный к движителю:
 ; (2.7.7)
; (2.7.7)
 - относительный гидродинамический момент движителя, равный
- относительный гидродинамический момент движителя, равный

В таком виде безразмерное дифференциальное уравнение (2.74) включается в состав расчетной системы дифференциальных уравнений движения судна. Безразмерный вид уравнения облегчает задачу на ранних этапах проектирования судна еще и в том, что относительные характеристики двигателей и коэффициент m0 стабильны для близких по размерам судов и можно пользоваться обобщенными данными.






