 2015-04-01
2015-04-01 1054
10541.2.1. Принцип образования механизмов
В данном сборнике задач принята классификация механизмов Артоболевского И. И. Впервые основной принцип создания механизмов был разработан Л. В. Ассуром. Смысл его в том, что любой механизм может быть образован последовательным присоединением к ведущему звену (звеньям) кинематических цепей с нулевой степенью подвижности.
Структурная формула группы имеет вид
3n – 2p5 = 0. (1.5)
Из этого выражения можно определить число звеньев и кинематических
|
 (1.6)
(1.6) | n | … | ||||
| p5 | … |
Задаваясь различными сочетаниями этих чисел, удовлетворяющих условию (1.6), получим группы разных классов.
Класс группы определяется наивысшим классом контура, образуемого звеньями группы. Группы II класса приведены на рис. 1.7, а, б; III класса – на рис. 1.7, в, г, д.
Рис. 1.7
В дальнейшем структурные группы стали называться группами Ассура. В своем составе они имеют кинематические пары только V класса. Если в механизме есть кинематические пары IV класса, то их следует заменить звеном, входящим в две пары V, то есть получить заменяющий механизм, а затем исследовать.
1.2.2. Структурная классификация плоских механизмов
Класс механизма определяется наивысшим классом группы Ассура, входящей в его состав.
Порядок определения класса механизма: 1) вычерчивается кинематическая схема (если есть пары IV класса, то вычерчивается заменяющий механизм) и определяется подвижность; 2) назначается ведущее звено (звенья); 3) отсоединяется самая удаленная от ведущего звена группа II класса, и определяется степень подвижности (W) оставшегося механизма. Она не должна меняться. Если W изменилась или механизм распался, следует отсоединить группу III класса и опять проверить подвижность. Так поступать до тех пор, пока не останется ведущее звено (ведущие звенья) и стойка; 4) записывается структурная формула в порядке создания механизма: [номер ведущего звена]®[номера звеньев первой за ведущим группы Ассура] ® [номера звеньев следующей группы] и так до последней группы; 5) указывается класса механизма.
Рассмотрим пример. На рис. 1.8 изображена схема механизма.
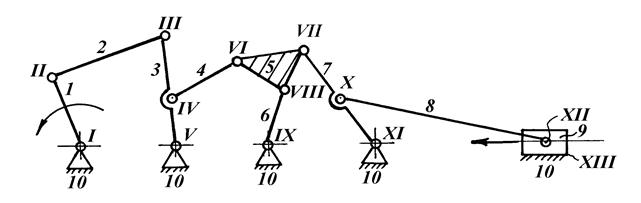
Рис. 1.8
1) Определяем подвижность механизма по формуле (1.4):
W = 3k – 2р5 – 1р4 при k = 9, р5 = 13, р4 = 0;
W = 3×9 – 2×13 – 0 = 1.
2) Назначаем ведущим звено № 1.
3) Разделяем данный механизм на группы Ассура, начиная с самой удаленной от ведущего звена (звенья 8 и 9 с кинематическими парами X, XII, XIII).
4) Проверяем степень подвижности оставшегося механизма:
W = 3k – 2р5 – 1р4 при k = 7, р5 = 10, р4 = 0;
W = 3×7 – 2×10 – 0 = 1.
Подвижность не изменилась, значит опять отсоединяем группу II класса: звенья 6 и 5 или 7 и 5. При этом отсоединении механизм разрушается, значит отсоединяем группу III класса (звенья 4, 5, 6, 7 с кинематическими парами IV, VI, VII, VIII, IX и XI).
5) Проверяем степень подвижности оставшегося механизма:
W = 3k – 2р5 – 1р4 при k = 3, р5 = 4, р4 = 0;
W = 3×3 – 2×4 – 0 = 1.
Подвижность не изменилась. Опять отсоединяем группу Ассура II класса: звенья 2 и 3 с кинематическими парами II, III и V.
6) Проверяем подвижность оставшегося механизма:
W = 3k – 2р5 – 1р4 при k = 1, р5 = 1, р4 = 0;
W = 3×1 – 2×1 – 0 = 1.
Осталось одно звено № 1 – ведущее.
7) Записываем структурную формулу в порядке присоединения групп Ассура, начиная с ведущего звена:
[1]®[2, 3]®[4, 5, 6, 7]®[8, 9].
В составе механизма две группы II класса (2, 3) и (8, 9) и одна – III класса (4, 5, 6, 7), значит данный механизм III класса.
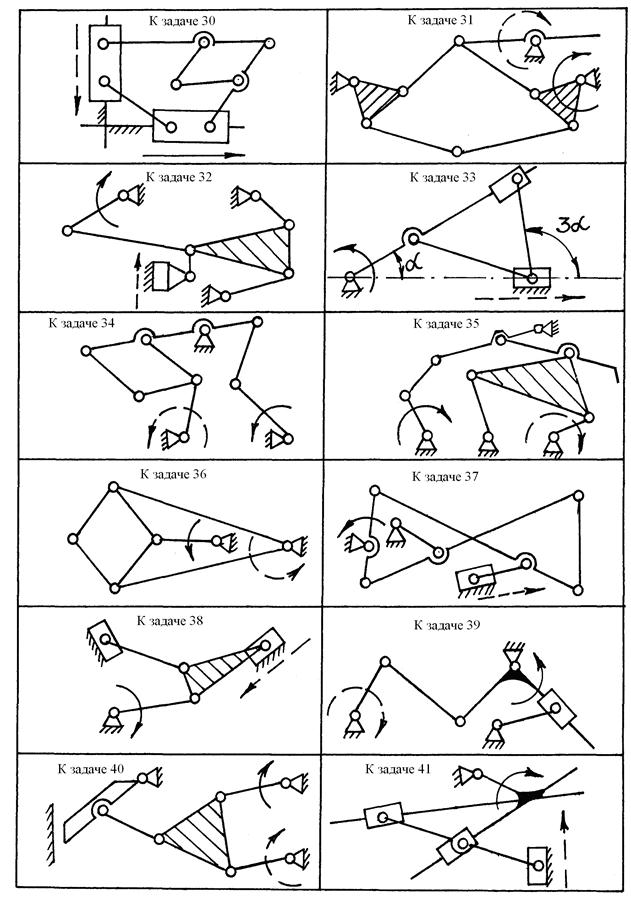
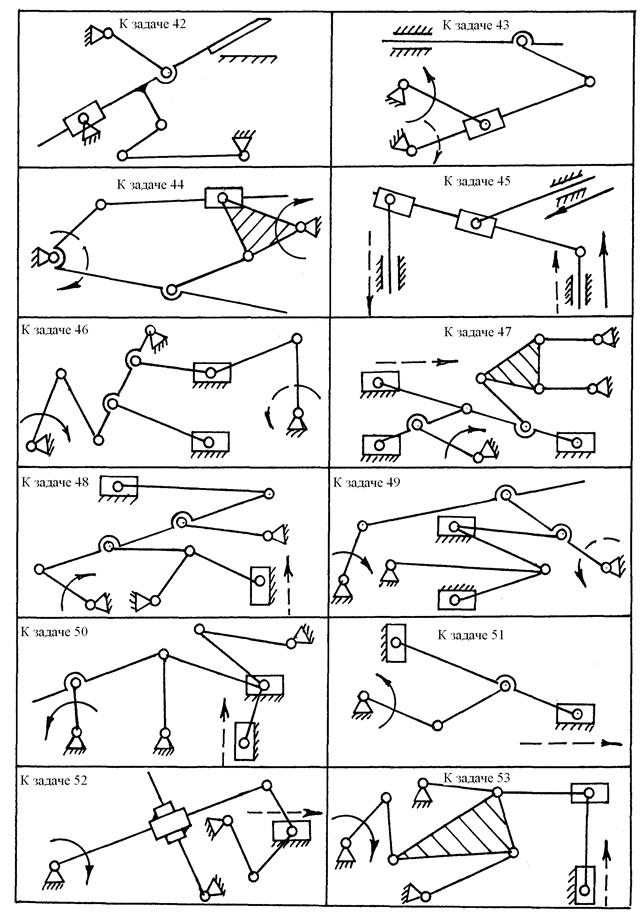
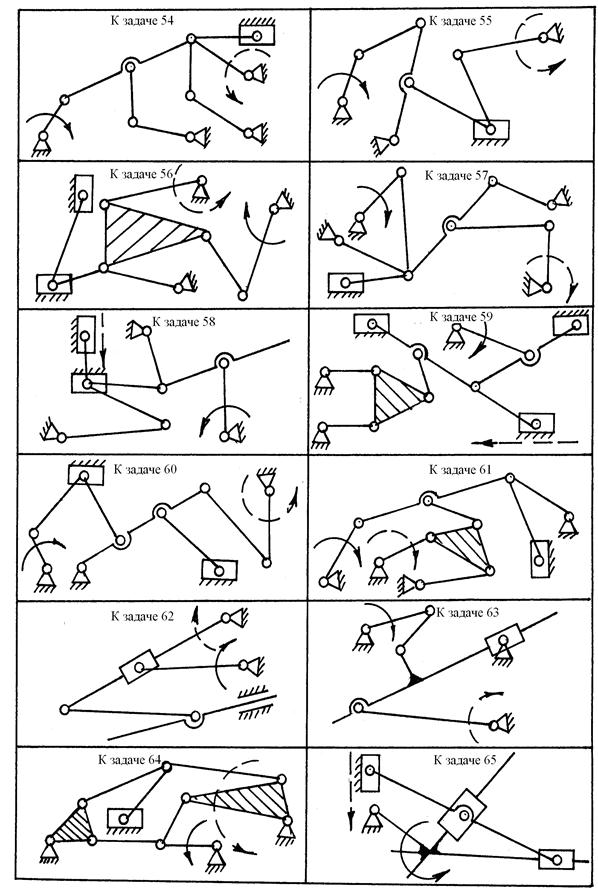
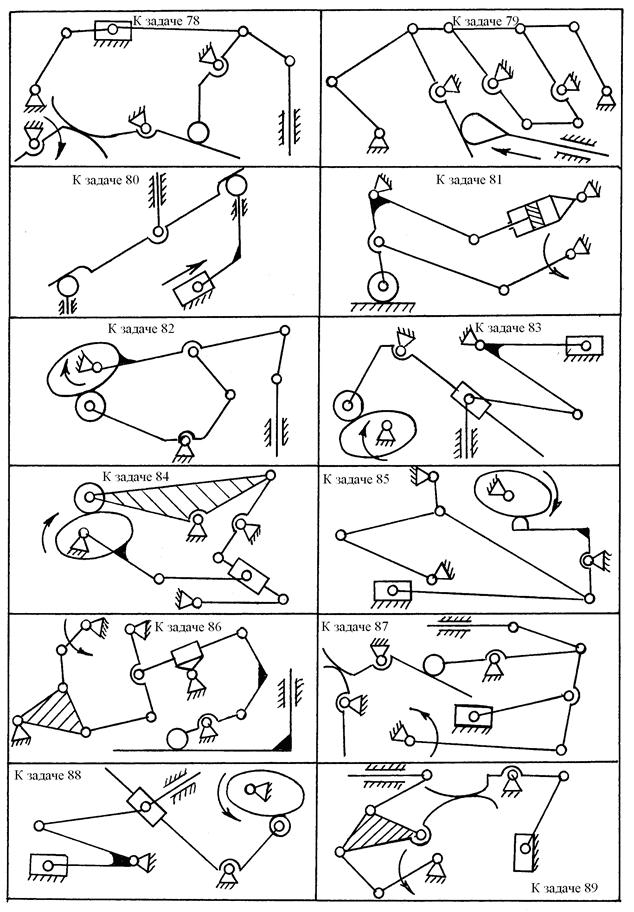
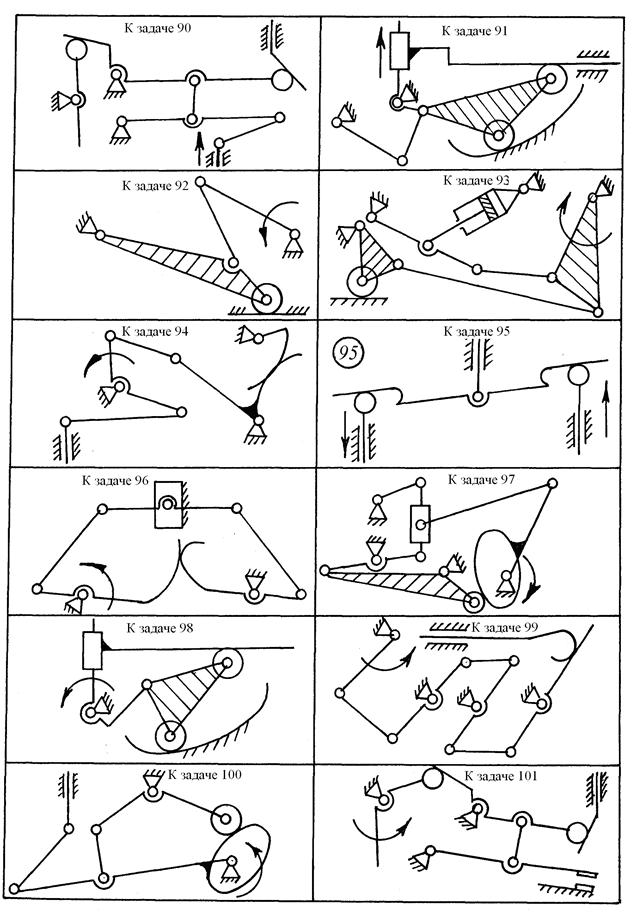
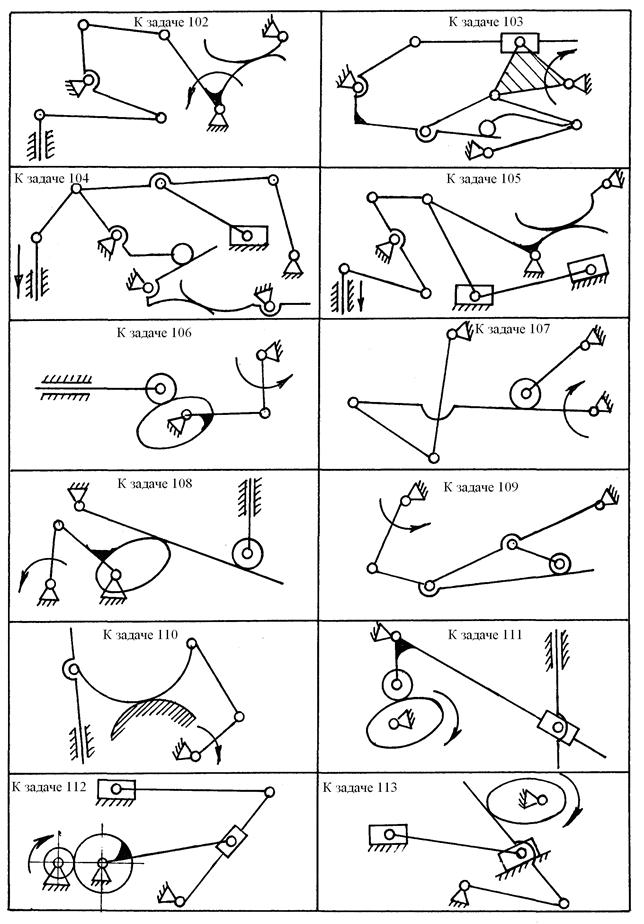
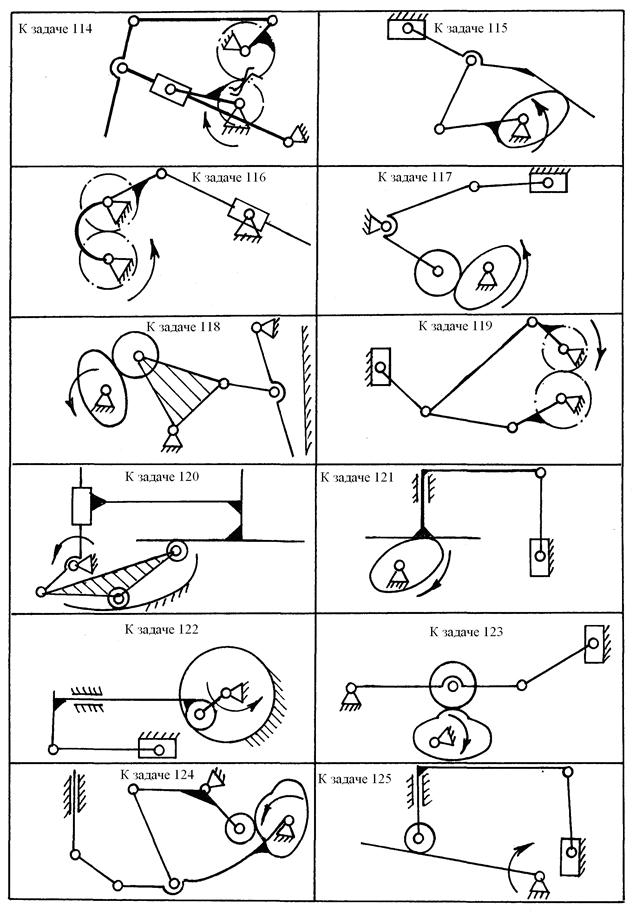
Для закрепления материала предлагаются задачи, в которых требуется определить подвижность и класс механизмов.
ЗАДАЧИ 30 – 125

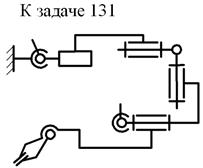
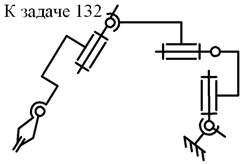
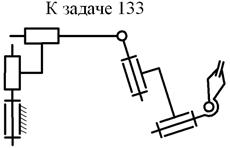
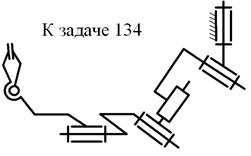
1.2.3. Структурная классификация пространственных механизмов
Пространственный рычажный механизм с незамкнутой кинематической
| цепью и с несколькими степенями свободы представляет собой основной механизм манипулятора. С его помощью решается ряд задач в различных областях науки и техники, связанной с работой в опасных и вредных для человека зонах. Манипуляторы могут быть с ручным и автоматическим управлением. Манипуляторы с ручным управлением копируют работу рук человека (копирующие). Рабочее пространство может быть увеличено за счет применения сферического шарнира. Управляют ими на расстоянии от оператора, используя следящие системы. В манипуляторах с автоматическим управлением звенья приводятся в движение от различных приводов. Такие манипуляторы с изменяемой программой, используемые в производстве, называются промышленными роботами (ПР). Структурная классификация пространственных механизмов подчиняется тем же законам, что и плоских механизмов. Подвижность определяется по формуле Сомова-Малышева для пространственных механизмов. |  а а  б б  в Рис. 1.9 в Рис. 1.9 |
Для примера рассмотрим схемы ПР, изображенных на рис. 1.9 а, б, в и подсчитаем подвижности каждого из них по формуле (1.3) при k = 6, p5 =6, p4 = = p3 = p2 = p1 = 0:
W = 6×6 – 5×6 = 6,
то есть с учетом движения губок схвата у данного ПР шесть степеней свободы.
На рис. 1.9, б изображена схема ПР «Универсал 15» с пятью степенями свободы (без учета движения губок схвата) при k = 5, p5 =5:
W = 6×5 – 5×5 = 5.
На рис. 1.9, в изображена схема ПР «М901» с тремя степенями свободы при k = 3, p5 =3:
W = 6×3 – 5×3 = 3.
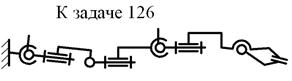
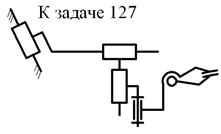
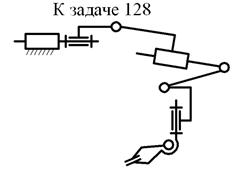
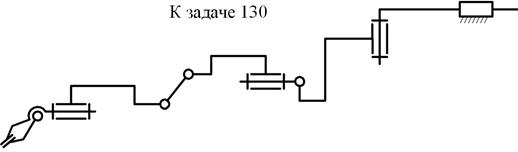
Для закрепления материала предлагаются задачи, в которых требуется определить подвижность механизмов.
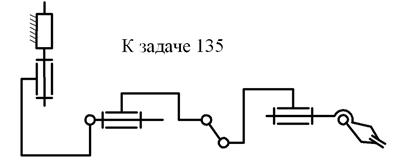
ЗАДАЧИ 126 – 135
 |  |
 |  |
 |
 |  |
 |  |
 |
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ








