 2015-04-01
2015-04-01 1101
1101Разработанная в ЛЭЭ ПГУТИ компьютерная программа [2.33] входит в состав ИС для поддержки решений, связанных с обеспечением безопасности по ЭМИ РТО различного назначения (радиосети стационарной и мобильной связи, ТРВ и др.). Ее назначение – расчетная оценка относительного экологического риска при разных вариантах размещения РТО в конкретных городских условиях. Приведем краткое описание программы в соответствии с методикой проведения СИМ и терминологией разделов 2.2-2.6 (см. также [2.10] и разделы 2.22).
1. Определение состава исходных данных. Установление числа биорецепторов Nmk (людей, проживающих в каждом из K домов вблизи РТО) для разных вариантов его размещения производится путем выбора соответствующих сведений из базы данных (БД) по г. Самаре. Разделение выбранных биорецепторов по M возрастным категориям и учет числа биорецепторов каждой категории, проживающих в зоне вокруг РТО, осуществляются также с помощью вышеупомянутой БД, после чего биорецепторам каждой возрастной категории присваивается «коэффициент стоимости» риска ARm. На данном этапе определяются и детерминированные параметры РТО: РА – излучаемая мощность; GA и H – коэффициент усиления и высота расположения передающей антенны; h – высота точки наблюдения (этажа) для зданий вокруг РТО, V [0;1] – фиксированный коэффициент, учитывающий степень «освещенности» k -го здания ЭМИ, создаваемым РТО.
2. Описание математической модели. Для определения относительного риска RS воспользуемся формулой (2.7), где критерий безопасности имеет вид КБk = ППЭk / ППЭПДУ £ 1; где ППЭk – плотность потока мощности ЭМИ, создаваемая РТО в диапазоне 300 МГц…300 ГГц для биорецепторов k -го кластера; ППЭПДУ = 10мкВт/см2 – соответствующее ему значение ПДУ. Для расчета значений ППЭ используем формулу ППЭ = РА GA·V 2 / 4 π [ R2 +(H – h)2]; где R – расстояние от передающей антенны РТО (размещенной на высоте H) до точки наблюдения (расположенной на высоте h) над поверхностью Земли (см. рис. 2.26). Отметим, что данное описание соответствует наиболее простой модели РТО и в реальных условиях для определения КБk могут быть использованы другие аналитические соотношения [2.10] – что не представляется принципиальным.
3. Описание работы программы. Программный продукт для определения относительного экологического риска реализован на объектно-ориентированном языке Delphi и состоит из независимых подпрограмм-модулей, обеспечивающих все необходимые для расчета RS функции и процедуры. Помимо значений задаваемых параметров моделирования, программа работает с доступными ей БД, также заложенными в систему проектирования, и имеет удобный пользовательский интерфейс. Механизм работы программы иллюстрирует схема алгоритма моделирования, приведенная на рис. 2.38.
Рис. 2.38. Схема алгоритма моделирования
На карте города выбирается объект исследования: задаются место расположения РТО (ул. Демократическая, дом 83 на рис. 2.39) и круговая зона вокруг него радиусом R. Затем с использованием БД задаются геометрические параметры (координаты X и Y на поверхности Земли; высота h и освещенность V точки наблюдения для k -го кластера), как это показано на рис. 2.40. После этого в программу вводятся остальные исходные данные (как детерминированные, так и статистические параметры), необходимые для расчета риска RS в соответствии с принятой математической моделью системы (см. рис. 2.41). Далее следует расчет уровня ППЭk и значения коэффициента безопасности КБk для k -го кластера, а затем для всех других K – 1 кластеров (зданий, показанных на рис. 2.39): получаемые в итоге результаты СИМ иллюстрирует рис. 2.42. Для каждого рассматриваемого варианта указанные операции повторяются в диалоговом режиме – после чего, с учетом полученных данных, пользователь делает выводы о выборе наилучшего: как с точки зрения риска RS, так и по другим обстоятельствам, варианта размещения РТО.
  |  |
| Рис. 2.39. Вариант размещения РТО в городе | Рис. 2.40. Параметры точки наблюдения в кластере |
4. Тестирование и пример работы программы. При апробировании программного продукта в качестве объекта СИМ были выбраны РТО, проектируемые по заданным адресам в г. Самаре в районе ул. Демократической (см. рис. 2.39). В качестве кластеров рассматривались здания, лежащие в пределах круговой зоны с радиусом R ≤ 100 м от каждого предполагаемого места размещения РТО. После загрузки в компьютер карты города и определения точек размещения РТО (ТРВ передатчик, БС сети СПР и ССС и т.п.), в диалоговом режиме вводились значения высоты h и освещенности V для всех представляющих интерес точек наблюдения, а также другие параметры, используемые при определении RS. Значение R в программе можно было изменять – аналогично другим исходным данным, необходимым для расчета ППЭ и КБ, а также PRm; ARm; Nmk и др. Для каждого заданного варианта размещения РТО на территории города программа «обсчитывала» K зданий, лежащих в радиусе R от РТО, и формировала результат в виде итогового значения RS (см. рис. 2.42). Форма представления выходных данных была рассчитана на проектировщиков, которые по совокупности всех предполагаемых параметров РТО (одним из которых является значение риска RS по фактору ЭМИ) выбирают наиболее целесообразный вариант его размещения в городе.
 | 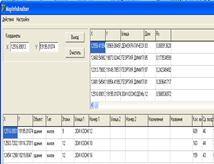 |
| Рис. 2.41. Исходные данные для расчета риска | Рис. 2.42. Результаты расчета риска RS |
Тестовые испытания разработанной программы предусматривали ввод в качестве исходных данных детерминированных значений параметров СИМ и сравнение полученных выходных результатов с расчетными значениями RS, полученными вручную для рассматриваемого контрольного варианта размещения РТО. Для K = 4 девятиэтажных зданий при размещении РТО по адресу ул. Демократическая, 83 (см. рис. 2.39), удаленных на расстояния R = 74,5... 94,2 м от РТО; для РА = 3,8 Вт; GA = 1,6; h = 3 м; V = 0,5; другие данные автоматически берутся из БД по г. Самаре, в результате тестирования было получено значение RS = 9,1·10-4; путем просчета вручную – RS = 9,8·10-4. Это говорит о том, что данный программный продукт отвечает указанным в [2.33] требованиям в отношении соответствия общего поведения СИМ-модели и реальной моделируемой системы, способности модели правильно отображать существенные особенности и детали процесса функционирования моделируемой системы.
Автоматизация процесса управления экологическим риском RS с помощью аналогичных программ для РТО и РЭС (как проектируемых, так и реально существующих) с целью повышения эффективности их функционирования при обеспечении максимальной безопасности для окружающей среды по фактору ЭМИ представляется в настоящее время важной научно-практической задачей.








