 2015-04-06
2015-04-06 1950
1950Естественным направлением развития коммерческих ПИД-регуляторов является разработка методов, позволяющих снизить затраты человеческого труда на их инсталляцию, настройку и обслуживание. Настройка может выполняться вручную или автоматически, без участия человека (автонастройка).
Автонастройка может выполняться полностью автоматически и " по требованию ", когда человек является инициатором настройки. Полностью автоматическая настройка может инициироваться при наступлении заранее заданного условия, например, при изменении нагрузки, при изменении внешних воздействий, при изменении погрешности регулирования, или непрерывно во времени. Автоматическая настройка, инициируемая без участия человека, называется адаптацией. Примером адаптации может быть автонастройка при изменении числа яиц в инкубаторе или нагрузки на валу двигателя. Разновидностью адаптации является разомкнутое управление параметрами регулятора (табличная автонастройка), когда заранее найденные параметры регулятора для разных условий работы системы заносятся в таблицу, из которой они извлекаются при наступлении условий, по которым инициируется адаптация.
|
|
|
Адаптация в принципе является медленным процессом, поэтому ее нельзя рассматривать как непрерывное слежение параметров регулятора за изменяющимися параметрами объекта.
Отметим, что регуляторы, настроенные в автоматическом режиме, чаще настроены хуже, чем настроенные в ручном режиме. Объясняется это философским рассуждением, что компьютер не может выполнять сложные и плохо формализуемые задачи лучше человека.
В настоящий момент отсутствуют простые, надежные и общепринятые методы автоматической настройки.
Табличное управление
Наиболее простым методом адаптации ПИД-регулятора к изменяющимся свойствам объекта управления является табличное управление коэффициентами регулятора. Оно может быть использовано не только для адаптивного управления, но и для управления нелинейными объектами, нестационарными процессами, при необходимости изменять параметры в зависимости от некоторых условий.
Принцип табличного управления очень прост (рис. 5.87).
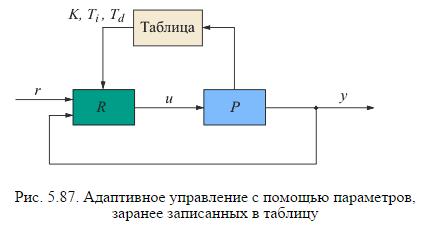
Зная заранее возможные изменения режима работы системы (например, возможные варианты загрузки инкубатора яйцами), выполняют идентификацию объекта для нескольких разных режимов и для каждого из них находят параметры регулятора. Значения этих параметров записывают в таблицу. В процессе функционирования системы измеряют величину, которая характеризует режим работы системы (например, вес яиц - с помощью датчика веса, или уровень жидкости в автоклаве с помощью датчика уровня) и в зависимости от ее значений выбирают из таблицы величины коэффициентов ПИД-регулятора.
|
|
|
Описанную систему можно рассматривать как систему с двумя контурами регулирования. Однако контур, служащий для адаптации, в нашем примере с уровнем жидкости в автоклаве или весом яиц в инкубаторе является разомкнутым. По этой причине табличное управление характеризуется высоким быстродействием, отсутствием ложного срабатывания или расхождения алгоритмов адаптации.
В общем случае таблица может быть многомерной; для снижения необходимой размерности таблицы можно использовать интерполяцию данных с помощью сплайна.
Недостатком этого метода являются большие затраты на предварительную идентификацию, необходимую для составления таблицы. Однако эту проблему частично можно решить применением специальных программных средств для автоматической идентификации и адаптации регулятора, после выполнения которых полученные параметры заносятся в таблицу.
Табличное управление коэффициентами регулятора целесообразно использовать в тех случаях, когда заранее известны виды и величины дестабилизируюших факторов, которые к тому же можно измерить.








