 2015-05-05
2015-05-05 1619
1619ВРД следует отличать от синхронного реактивного электродвигателя (СРД), который работает при синусоидально изменяющихся напряжениях, подаваемых на фазы его обмотки якоря без обратной связи по положению ротора, при этом СРД обладает низким КПД.
Электрическая машина типа ВРД устроена проще, чем традиционные машины переменного тока - синхронная и асинхронная, она более технологична и менее материалоемка, что создает предпосылки для достижения высоких показателей надежности, экономичности, низкой стоимости и стойкости ее к воздействиям окружающей среды. Впервые в системе управляемого электропривода удается сбалансировать показатели эффективности электронной управляющей части и электромеханического преобразователя машины.
Появление и развитие электроприводов нового типа означает конец эры коллекторных электрических машин, применение которых в разрабатываемых системах электропривода становится анахронизмом. Даже асинхронная машина, повсеместное распространение которой было обусловлено простотой конструкции и надежностью, уступает по этим параметрам ВРД.
Рис 1 Схема ВРД
Конструктивно электропривод состоит из микропроцессорного блока управления, электронного коммутатора и электромеханического преобразователя (ЭМП). Электромеханический преобразователь обеспечивает преобразование электрической энергии, поступающей от электронного коммутатора, в механическую или осуществляет обратное преобразование механической энергии в электрическую. Микропроцессорный блок управления формирует сигналы коммутатора, который генерирует импульсное напряжение питания ЭМП в зависимости от сигналов, поступающих от датчика положения ротора ЭМП. Возможен вариант без датчика положения ротора, в этом случае положение ротора определяется по величине индуктивности обмоток статора.
Отличительную основу ЭМП составляют магнитопроводы статора и ротора с явно выраженными полюсами, выполненные в виде пакетов из листового магнитомягкого материала. Катушки обмотки якоря расположены на полюсах магнитопровода статора. Катушки, находящиеся на противоположных полюсах, соединены попарно последовательно и образуют фазные секции обмотки якоря. На рис. 2 в качестве примеров показаны ЭМП с шестью и восемью полюсами на статоре и четырьмя и шестью полюсами на роторе соответственно.
Рис. 2 ЭМП с шестью и восемью полюсами
В зависимости от назначения электродвигателя / генератора и предъявляемых к нему в связи с этим требований, количество полюсов на статоре и на роторе может изменяться. В некоторых случаях на полюсах магнитопровода статора могут быть сделаны дополнительные зубцы. Обмотка якоря, в приведенных на рисунке примерах ЭМП, трехфазная и четырехфазная, соответственно. Количество полюсов статора и ротора, число фаз обмотки якоря может изменяться в зависимости от назначения электродвигателя / генератора. Подбором чисел полюсов статора и ротора может быть получен вращающий момент существенно больший по сравнению с электрическими машинами других типов.
Очевидная конструктивная простота является основным достоинством электромеханического преобразователя ВРД, что позволяет существенно снизить затраты при его изготовлении и обеспечить очень высокую надежность работы электродвигателя / генератора. В качестве примера на рисунках 3, 4, 5 показаны основные части нескольких вариантов ЭМП вентильных реактивных электродвигателей и генераторов.


Рис.3 Основные части ЭМП Рис.4 Основные части ЭМП

Рис.5 Основные части ЭМП
На рис.6 приведена механическая характеристика ЭМП в режиме с ограничением тока. Естественная механическая характеристика ЭМП при постоянном питающем напряжении аналогична такой же характеристике коллекторного электродвигателя постоянного тока с последовательным возбуждением.
Рис.6 Механическая характеристика ЭМП в режиме с ограничением тока
Особенности электромеханического преобразования энергии в вентильном электродвигателе с переключаемой магнитной проводимостью заключаются в несинусоидальности токов и магнитных потоков в ЭМП и нелинейной зависимости между ними. Эти особенности не позволяют использовать методы, широко применяемые для анализа и синтеза электрических машин переменного тока традиционного конструктивного исполнения. Анализ и синтез ЭМП необходимо осуществлять с непременным учетом дискретности цикла электромеханического преобразования энергии и существенной нелинейной зависимости между токами в фазах и создаваемыми ими магнитными потоками в комплексе "электронный коммутатор - ЭМП".
Для проектирования ЭМП используется современный подход, включающий расчет магнитного поля в нелинейной постановке задачи. При этом учитываются реальные параметры материалов и особенности геометрии устройства. На рис. 7 показаны результаты расчета магнитного поля, представляющие зависимость потокосцепления фазной обмотки от угла поворота ротора и протекающего в ней тока.
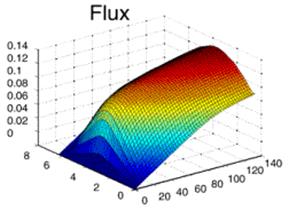
Рис.7 Результаты расчета магнитного поля
Электронный блок управления электродвигателя / генератора представляет собой цифровую систему управления на базе нового поколения 16-разрядных микроконтроллеров производительностью до 40 млн. операций в секунду. Цифровая система управления позволяет резко сократить количество используемых компонентов, увеличить надежность и функциональность системы, уменьшить габаритные размеры электронного блока и его стоимость.
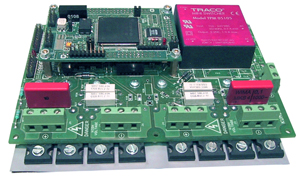
Рис.8 KUMB203 - универсальный цифровой блок управления электродвигателями
На рис. 8 показан блок электроники для электродвигателей / генераторов мощностью до 8 кВт. (Габариты 170х125х30 мм.)
KUBM203 предназначен для управления электродвигателями следующих типов:
1) Электродвигателей постоянного тока:
- с последовательным возбуждением;
- с независимым возбуждением;
- с возбуждением от постоянных магнитов;
2) Асинхронных электродвигателей:
- 2-фазных;
- 3-фазных;
3) Вентильных электродвигателей с постоянными магнитами:
- 2-фазных;
- 3-фазных;
4) Синхронных электродвигателей:
- 2-фазных с постоянными магнитами;
- 2-фазных с возбуждением;
- 3-фазных с постоянными магнитами;
- 3-фазных с возбуждением;
5) Шаговых электродвигателей:
- 2-фазных;
- 3-фазных;
6) Вентильных реактивных электродвигателей (SRM):
- 2-фазных;
- 3-фазных;
- 4-фазных.
Технические характеристики:
· Максимальный выходной ток:
· Вариант с MOSFET транзисторами – 40 А при Umax < 100В.
· Вариант с IGBT транзисторами – 24 А при Umax < 600 B.
· Защита от перегрузки по току:
· Величина перегрузки тока устанавливается программно.
· Напряжение питания:
· Вариант с MOSFET транзисторами от 12 до 100 В постоянного или переменного напряжения (1-3ф, 0-400 Гц);
· Вариант с IGBT транзисторами от 100 до 600 В постоянного или переменного напряжения (1-3ф, 0-400 Гц);
· Максимальная мощность нагрузки:
· – < 10 КВт (зависит от напряжения питания и типа электродвигателя);
· Защита электродвигателя от перегрева:
· Порог максимального нагрева электродвигателя устанавливается программно;
· Оптоизолированный CAN интерфейс 2.0 A, 2.0 B – обеспечивает интеграцию c другими блоками и системами управления;
· Каналы цифрового ввода-вывода – 4 (TTL) (для подключения датчиков положения ротора);
· Каналы оптоизолированного цифрового ввода – 6 (TTL) (для подключения клавиатуры и дополнительных датчиков);
· Каналы оптоизолированного цифрового вывода – 4 (TTL) (для подключения дополнительных исполнительных устройств);
· Микроконтроллер – 10 млн операций в сек (на плате установлен контроллер M167-2)
· Flash память – до 1Мбайт, ОЗУ – 256 Кбайт.
· Размер платы:
· (без радиатора) – 170х122 мм
· Рабочая температура:
· 0° - 70°С (–40°C - +85°С)
Цифровой синтез сигналов, поступающих с электронного коммутатора на ЭМП, осуществляется программно с помощью микропроцессорного блока управления. Программный синтез сигналов позволяет оперативно изменять частоту, форму и амплитуду выходных импульсов в зависимости от состояния датчиков электропривода / генератора, а также обеспечивает оперативное управление режимами его работы.
Микроконтроллер формирует основные управляющие сигналы, которые поступают на 3- или 4-фазный драйвер, обеспечивающий управление силовыми транзисторами электронного коммутатора. Конфигурация блока питания может быть изменена в зависимости от типа и величины напряжения питания, что позволяет на базе одного блока создавать электроприводы и генераторы различного назначения. При низковольтном напряжении питания (5 - 200 В) в блоке коммутатора используются MOSFET-транзисторы, а при высоковольтном (200 В и более) - IGBT-транзисторы. Применение современных мощных IGBT-транзисторов позволяет создавать электронные коммутаторы мощностью 5000 кВт и более, обеспечивая высокие энергетические и весогабаритные характеристики вентильным реактивным электроприводам / генераторам.
Основная управляющая программа контроллера хранится во Flash-памяти объемом до 256 Кбайт и может быть легко изменена через последовательный интерфейс RS232, что позволяет оперативно изменять основные характеристики и алгоритм работы стартера / генератора в процессе настройки или во время его эксплуатации.
Наличие микропроцессора в системе управления ВРД обеспечивает следующие режимы его работы:
· регулирование оборотов в широких пределах и стабилизацию их на заданном уровне;
· коррекцию естественно падающей механической характеристики ВРД для оптимизации параметров электропривода с тяговой, вентиляторной, крановой, экскаваторной и другими типами нагрузок;
· разгон и торможение с необходимым ускорением;
· пуск электропривода без превышения пусковых токов над номинальными, с предварительным выбором люфта редуктора;
· рекуперацию энергии при торможении;
· реверсирование;
· самоторможение для исключения вращения нагруженного электропривода;
· шаговый режим работы;
· питание от сетей постоянного и переменного (однофазного и 3 фазного) напряжения; для генератора - стабилизацию и формирование выходного напряжения;
· выдачу на дисплей текущих параметров электродвигателя / генератора и любой информации, поступающей с периферийных датчиков;
· прием и выдачу команд и информации как в аналоговом, так и в цифровом виде;
· дистанционное изменение параметров электропривода / генератора и алгоритма его работы;
Для связи с внешними компьютерными системами, активными пультами управления или для обеспечения параллельной работы и синхронизации нескольких электроприводов / генераторов в блоке управления может использоваться сетевой CAN-интерфейс (международный стандарт CAN 2.0 CiA-301). CAN (Controller Area Network) - сетевой интерфейс разработан фирмами "BOSH" и "INTEL" для построения распределенных встраиваемых мультипроцессорных систем реального времени бортового и промышленного назначения. CAN обеспечивает надежную работу системы даже в условиях сильных электромагнитных помех. На рисунке 9 показано подключение нескольких электродвигателей к CAN сети.
Рис. 9 Подключение нескольких электродвигателей к CAN сети.
CAN сеть обеспечивает эффективный обмен информацией между электронными блоками электродвигателей, а также обмен между пультом или несколькими пультами и каждым электродвигателем. Высокая скорость передачи (до 1Мбит/сек), гибкая система задания приоритетов CAN устройств позволяет передавать по сети синхросигналы или команды с критическим временем выполнения. На рис. 10 приведен пример организации следящей системы с использованием CAN сети.
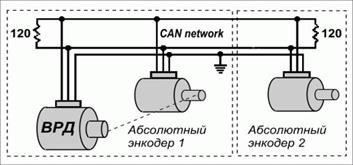
Рис. 10 Пример организации следящей системы с использованием CAN сети

