 2015-04-30
2015-04-30 1942
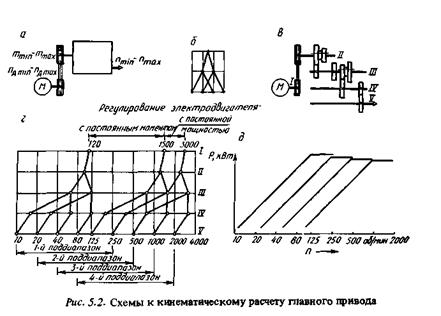
1942Исходными данными для кинематического расчета привода являются: выбранная структура привода (рис. 5.2), предельные частоты вращения шпинделя  , предельные и номинальная частоты вращения электродвигателя
, предельные и номинальная частоты вращения электродвигателя  знаменатель ряда передаточных отношений передач коробки скоростей
знаменатель ряда передаточных отношений передач коробки скоростей  , передаточное отношение постоянной ременной передачи
, передаточное отношение постоянной ременной передачи  (или двух ременных передач - в зависимости от структуры привода). Необходимо определить число ступеней коробки скоростей, передаточные отношения ее передач и числа зубьев колес.
(или двух ременных передач - в зависимости от структуры привода). Необходимо определить число ступеней коробки скоростей, передаточные отношения ее передач и числа зубьев колес.
Если в приводе применен электродвигатель постоянного тока с двухзонным регулированием, диапазон его регулирования при постоянном моменте равен  , при постоянной мощности -
, при постоянной мощности -  , диапазон регулирования механической коробки скоростей —
, диапазон регулирования механической коробки скоростей —  , то общий диапазон регулирования двигателя (электрического регулирования привода)
, то общий диапазон регулирования двигателя (электрического регулирования привода)
диапазон регулирования привода

Отсюда

Соответственно способу регулирования электродвигателя производится регулирование частоты вращения шпинделя при постоянном моменте или при постоянной мощности. Диапазон регулирования шпинделя при постоянной мощности
 (5.1)
(5.1)
Диапазоны регулирования можно определить по исходным данным:
Так как диапазон регулирования z-ступенчатой коробки скоростей определяется по зависимости
 (5.2)
(5.2)
и для обеспечения бесступенчатого регулирования частоты вращения шпинделя во всем диапазоне (без "провалов") принимают,  из зависимостей (5.1) и (5.2) следует
из зависимостей (5.1) и (5.2) следует

Отсюда требуемое число ступеней коробки скоростей
Число ступеней коробки скоростей, а следовательно, и число поддиапазонов регулирования привода оптимизируют. Когда электродвигатель обеспечивает бесступенчатое регулирование частоты вращения входного вала коробки скоростей с постоянной мощностью в интервале от  до
до  и шпинделя при таком же регулировании в интервале от
и шпинделя при таком же регулировании в интервале от  до,
до,  диапазоны регулирования
диапазоны регулирования

Если  и
и  числа интервалов, соответствующие
числа интервалов, соответствующие  на графике частот вращения,
на графике частот вращения,
Если  и
и  количество частот вращения электродвигателя и шпинделя при регулировании с постоянной мощностью,
количество частот вращения электродвигателя и шпинделя при регулировании с постоянной мощностью,
В общем случае двумя соседними поддиапазонами регулирования могут перекрываться  интервалов. Тогда необходимое число ступеней коробки скоростей (поддиапазонов регулирования)
интервалов. Тогда необходимое число ступеней коробки скоростей (поддиапазонов регулирования)
 (5.3)
(5.3)

Если  необходимо использовать двухступенчатую коробку передач. При
необходимо использовать двухступенчатую коробку передач. При  , допуская "провал" регулирования с постоянной мощностью между двумя поддиапазонами, также можно использовать двухступенчатую коробку. В "провале" производится регулирование t постоянным крутящим моментом. При этом упрощается механическая часть станка, но снижается его производительность. Требуемый диапазон регулирования частоты вращения шпинделя можно получить и введением в двухступенчатую коробку гитары сменных колес.
, допуская "провал" регулирования с постоянной мощностью между двумя поддиапазонами, также можно использовать двухступенчатую коробку. В "провале" производится регулирование t постоянным крутящим моментом. При этом упрощается механическая часть станка, но снижается его производительность. Требуемый диапазон регулирования частоты вращения шпинделя можно получить и введением в двухступенчатую коробку гитары сменных колес.
При  'следует применять трехступенчатую коробку скоростей, а при
'следует применять трехступенчатую коробку скоростей, а при  четырехступенчатую. Двух- и трехступенчатые трехваловые коробки по металлоемкости значительно лучше двухваловых.
четырехступенчатую. Двух- и трехступенчатые трехваловые коробки по металлоемкости значительно лучше двухваловых.
В станках с числовым программным управлением часто применяют приводы с двигателем постоянного тока и ступенчатым регулированием частоты вращения шпинделя. При этом используют ряд частот с малым знаменателем  обычно равным 1 J. 2 (реже 1,06). Благодаря этому управление приводом упрощается, а экономические потери вследствие отклонения от оптимальной скорости резания незначительны. В этом случае где
обычно равным 1 J. 2 (реже 1,06). Благодаря этому управление приводом упрощается, а экономические потери вследствие отклонения от оптимальной скорости резания незначительны. В этом случае где  l число делений интервала
l число делений интервала 
Пример. Произвести кинематический расчет главного привода (см. рис. 5.2, а) при условии, что регулирование частоты вращения во всем диапазоне должно быть бесступенчатым. Предельные частоты вращения шпинделя  10 об/мин,.
10 об/мин,.  = 2000 об/мин, электродвигателя
= 2000 об/мин, электродвигателя  100 об/мин,
100 об/мин,  3000 об/мин. Производится двухзонное регулирование двигателя, его номинальная частота вращения
3000 об/мин. Производится двухзонное регулирование двигателя, его номинальная частота вращения  :1500 об/мин, Передаточное отношение ременной передачи
:1500 об/мин, Передаточное отношение ременной передачи  0,8.
0,8.
Расчет осуществляется следующим образом. Определяем диапазоны регулирования привода

двигателя

двигателя при постоянной мощности

двигателя при постоянном моменте

шпинделя при постоянной мощности

Для обеспечения бесступенчатого регулирования частоты вращения шпинделя при постоянной мощности знаменатель ряда передаточных отношений передач коробки скоростей  принимаем равным
принимаем равным  Требуемое число ступеней коробки скоростей (число поддиапазонов регулирования частоты вращения шпинделя)
Требуемое число ступеней коробки скоростей (число поддиапазонов регулирования частоты вращения шпинделя)
Принимаем z = 4. Проверка по зависимости (5.3) показала, что следует применить четырехступенчатую коробку скоростей. Тогда диапазон регулирования коробки скоростей
электрического регулирования привода

Предполагаем сделать коробку с двумя групповыми и одиночной передачами (рис. 5.2, б), Строим структурную сетку коробки (рис. 5.2, б), приняв в качестве основной первую по порядку группу. Определяем минимальные частоты вращения шпинделя для каждого из поддиапазонов регулирования:  10 об/мин,10
10 об/мин,10  х
х
При постоянной мощности диапазон регулирования шпинделя

минимальная частота вращения

Максимальные частоты вращения шпинделя для каждого из поддиапазонов регулирования определяются как члены геометрической прогрессии со знаменателем  :
: 

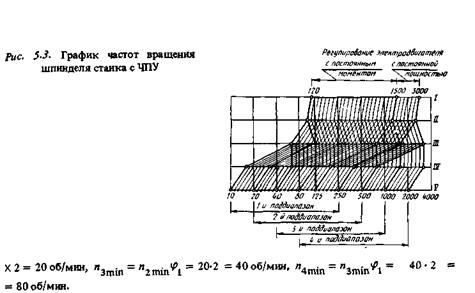
Строим график частот вращения шпинделя (рис. 5.2, г) и диаграммы мощности для всех поддиапазонов регулирования (рис. 5.2, д).
На рис. 5.3 приведен график частот вращения шпинделя для случая, когда в приводе применен двигатель постоянного тока, а регулирование скорости вращения шпинделя производится ступенчато с малым  Этот график получен из предыдущего путем деления
Этот график получен из предыдущего путем деления  на
на  В результате
В результате 

