 2015-05-10
2015-05-10 1483
1483Работа 4.5. Пьезоэлектрические измерительные преобразователи. Измерение переменных ускорений
Цель работы
Ознакомление с устройством и применением пьезоэлектрических измерительных преобразователей, изучение их функций преобразования, измерение переменных ускорений при помощи акселерометра, знакомство с динамическими характеристиками преобразователей и современными средствами сбора и обработки экспериментальных данных.
Сведения, необходимые для выполнения работы
Повторите вопросы обработки и представления результатов прямых и косвенных измерений и, используя литературу [4,16-21], настоящее описание и приложение 1, ознакомьтесь со следующими вопросами:
· Основные характеристики измерительных преобразователей.
· Принцип действия, устройство и характеристики пьезоэлектрических пре-
образователей.
· Методы измерения переменных напряжений.
· Причины возникновения и способы исключения или учета динамических
погрешностей.
· Схемы включения и измерительные цепи пьезоэлектрических преобразователей.
· Устройства и характеристики средств измерений, используемых при вы-
полнении данной работы.
Для измерения переменных ускорений применяются акселерометры, состоящие из электронного вольтметра и измерительного преобразователя «ускорение - электрическое напряжение». Чувствительным элементом в акселерометрах обычно служит пластинка из пьезоэлектрика - кристалл кварца, сегнетова соль, керамика титаната бария и др. Такие датчики являются генераторами переменной ЭДС с очень большим внутренним сопротивлением, использование их для целей измерения практически было бы невозможно без электронных вольтметров.
Если к рабочим граням пьезоэлектрической пластинки приложить силу Р, то на этих гранях появятся противоположные по знаку электрические заряды +q и -q. При этом
Q = k× Р,
где к - пьезоэлектрическая постоянная, зависящая от материала и формы пластинки и от технологии ее изготовления.
При наличии силы Р пластинка становится заряженным конденсатором с разностью потенциалов на обкладках Е:
E = q/C = (k/C)·P, (4.5.1)
где С - электрическая емкость пластинки.
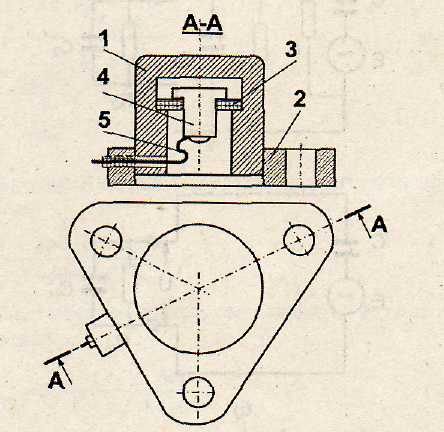
Рис. 4.5.1. Конструкция пьезоэлектрического преобразователя (пьезодатчика) переменного ускорения
Пьезоэлектрические датчики могут применяться для измерения переменных во времени сил, давлений, ускорений, деформаций. На рис. 4.5.1 приведен эскиз конструкции преобразователя, предназначенного для измерения ускорений. В корпус 1 вклеено кольцо 3 из керамики титаната бария. В отверстии кольца закреплена инерционная масса 4 из проводникового материала. Основание преобразователя 2 крепится к объекту, ускорение которого нужно измерить. Провод 5, соединенный с инерционной массой 4, выводится в экранированном кабеле через отверстие в основании. Второй провод, включающий преобразователь в измерительную схему, присоединяется к корпусу, то есть находится под потенциалом земли.
При перемещении в пространстве ускоряемого объекта вместе с преобразователем на пьезоэлектрическую пластинку будет действовать сила
Р =  (4.5.2)
(4.5.2)
Где γ - ускорение объекта по оси датчика; m - масса детали 4.
Подставив (4.5.2) в (4.5.1), получим выражение функции преобразования датчика:
 (4.5.3)
(4.5.3)
Из этой формулы видно, что разность потенциалов, возникающая на преобразователе, прямо пропорциональна ускорению. Коэффициент пропорциональности  является чувствительностью датчика к ускорению.
является чувствительностью датчика к ускорению.
Разность потенциалов Е непосредственно измерить практически невозможно из-за большого комплексного сопротивления датчика, вследствие чего подключение вольтметра даже с очень большим входным сопротивлением ведет к тому, что напряжение на обкладках пьезоэлектрической пластины становится меньше.
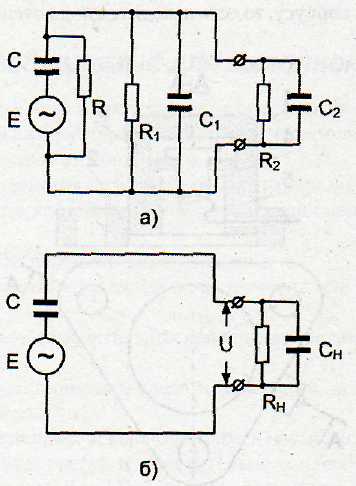
Рис. 4.5.2. Эквивалентная схема пьезоэлектрического преобразователя
На рис. 4.5.2а приведена эквивалентная электрическая схема пьезоэлектрического преобразователя с подключенным вольтметром (или осциллографом). Преобразователь надо рассматривать как источник ЭДС Е, шунтированный сопротивлением утечки R. Он имеет собственную емкость С. Провода, идущие к вольтметру, также имеют некоторую емкость С1. Сопротивление изоляции между ними R1. Сам вольтметр имеет активное сопротивление R2 и входную емкость С2. Сопротивлением соединительных проводов в данной схеме можно пренебречь, поскольку оно мало по сравнению с другими сопротивлениями, указанными в схеме.
Составленную эквивалентную схему можно упростить, представив ее так, как это показано на рис. 4.5.2б, где Сн и Rн, являются сопротивлением и емкостью, заменяющими сопротивления R, R1 и R2 и емкости С1 и С2 в схеме рис. 4.5.2а.
Ускорение γ, подлежащее измерению акселерометром с пьезоэлектрическим датчиком, может изменяться во времени по самым разнообразным законам и, в частности, оставаться постоянным.
Для анализа работы измерительных устройств в динамическом режиме, когда измеряемая величина не остается постоянной, прибегают к рассмотрению так называемой комплексной частотной функции, дающей закон изменения величины на выходе измерительного устройства при синусоидальном изменении величины на входе.
Если ускорение  будет изменяться по закону
будет изменяться по закону
 ,
,
то, согласно (4.5.3), ЭДС Е в схеме рис. 4.5  будет вектором:
будет вектором:

с амплитудным значение
 , (4.5.4)
, (4.5.4)
В этом случае величина на выходе – напряжение  будет равно:
будет равно:
Подставив значение  из (4.5.4) и сделав элементарные преобразования правой части, получим
из (4.5.4) и сделав элементарные преобразования правой части, получим

Чувствительность акселерометра, состоящего из датчика и измерительного прибора, будет равна

Здесь  - постоянная времени акселерометра, - величина постоянная.
- постоянная времени акселерометра, - величина постоянная.
Уравнение (4.5.7) описывает так называемую комплексную частотную функцию акселерометра.
Чувствительность измерителя зависит от частоты, и модуль ее равен

Используя (4.5.6), получим:

Это уравнение описывает амплитудно-частотную характеристику (АЧХ), определяющую зависимость амплитуды напряжения Umax от амплитуды ускорения  и от частоты колебаний
и от частоты колебаний  . Как видим, зависимость Umax от является линейной; зависимость от частоты колебаний более сложная. На рис. 4.5.3 показан характер амплитудно-частотной характеристики акселерометра.
. Как видим, зависимость Umax от является линейной; зависимость от частоты колебаний более сложная. На рис. 4.5.3 показан характер амплитудно-частотной характеристики акселерометра.
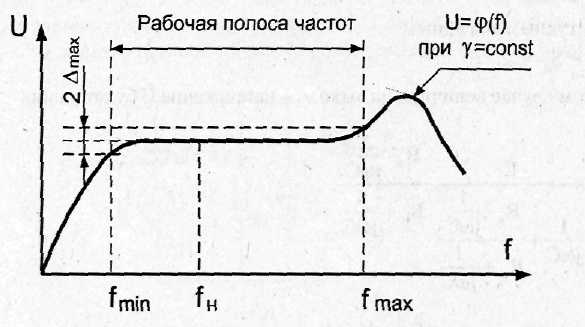
Рис. 4,5.3. Амплитудно-частотная характеристика акселерометра
Из графика, приведенного на рис. 4.5.3, и из формулы (4.5.9) видно, что при частоте  напряжение на зажимах вольтметра равно нулю, то есть при помощи пьезоэлектрического акселерометра нельзя измерять ускорения (или силы) постоянные, не изменяющиеся во времени. По мере повышения частоты напряжение
напряжение на зажимах вольтметра равно нулю, то есть при помощи пьезоэлектрического акселерометра нельзя измерять ускорения (или силы) постоянные, не изменяющиеся во времени. По мере повышения частоты напряжение  быстро растет, затем в некотором диапазоне частот оно мало изменяется. Этот диапазон является той областью частот, в которой можно пользоваться данным прибором для измерений с погрешностями, лежащими в пределах допустимых значений. В области высоких частот (свыше 10 кГц) АЧХ имеет повышение при частотах вблизи собственной частоты колебаний пьезопластинки. При дальнейшем росте частоты колебаний чувствительность комплекта из датчика и прибора быстро уменьшается, что, однако, не отражено в формуле (4.5.9), определяющей частотные свойства только электрической схемы прибора, но не учитывающей инерционность и упругие силы пьезоэлектрической пластины с укрепленной в ней металлической деталью 4 (см. рис. 4.5.1).
быстро растет, затем в некотором диапазоне частот оно мало изменяется. Этот диапазон является той областью частот, в которой можно пользоваться данным прибором для измерений с погрешностями, лежащими в пределах допустимых значений. В области высоких частот (свыше 10 кГц) АЧХ имеет повышение при частотах вблизи собственной частоты колебаний пьезопластинки. При дальнейшем росте частоты колебаний чувствительность комплекта из датчика и прибора быстро уменьшается, что, однако, не отражено в формуле (4.5.9), определяющей частотные свойства только электрической схемы прибора, но не учитывающей инерционность и упругие силы пьезоэлектрической пластины с укрепленной в ней металлической деталью 4 (см. рис. 4.5.1).
Если шкалу акселерометра проградуировать в значениях амплитуды ускорения при некоторой частоте fH, то при любой другой частоте f1 показания прибора будут иметь погрешность, равную  . Величина определяет частотную погрешность прибора. Если техническими условиями установлено, что частотная погрешность не должна превышать величину
. Величина определяет частотную погрешность прибора. Если техническими условиями установлено, что частотная погрешность не должна превышать величину  , то частотный диапазон прибора будет заключен между нижней граничной частотой
, то частотный диапазон прибора будет заключен между нижней граничной частотой  min и верхней граничной частотой
min и верхней граничной частотой  .
.
Из (4.5.9) видно, что зависимость Umax от частоты становится малой после того, как частота со достигает значений, при которых удовлетворяется неравенство

Если принять меры к увеличению RH, то нижняя граничная частота уменьшится, то есть будет расширен рабочий диапазон частот. Снижение нижней граничной частоты возможно и за счет увеличения g w:val="-4"/><w:sz w:val="28"/><w:sz-cs w:val="28"/></w:rPr><m:t>H</m:t></m:r></m:sub></m:sSub></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  , но это ведет к одновременному снижению чувствительности акселерометра.
, но это ведет к одновременному снижению чувствительности акселерометра.
Уравнение (4.5.9) раскрывает закон изменения показаний вольтметра с изменением ускорения и его частоты, но не дает возможности градуировать шкалу акселерометра расчетным путем из-за трудности точного определения числовых значений величин SД,R, RH, С и Сн в правой части (4.5.9). По этой причине акселерометры с пьезодатчиками градуируют по образцовому акселерометру. Можно действительное значение ускорения синусоидального колебания найти не по образцовому акселерометру, а расчетным путем, измерив предварительно тем или иным способом частоту и амплитуду колебаний корпуса датчика. При синусоидальном колебании мгновенное значение расстояния L центра тяжести колеблющегося тела от среднего положения изменяется по закону
 ,
,
где А - амплитуда колебаний (половина полного размаха), со - угловая частота.
Для вычисления ускорения следует определить вторую производную d3l/dt2, то есть амплитуду ускорения можно найти по формуле

где - частота колебаний.
Уравнение (4.5.9) выведено и действительно только для гармонических колебаний, при этом условии напряжение на зажимах вольтметра тоже будет чисто синусоидальным. Если измерить действующее значение этого напряжения, то из (4.5.9.) получим:

или
 , (4.5.11)
, (4.5.11)
где S - чувствительность акселерометра как комплекта из датчика и электронного вольтметра; размерность чувствительности выражается в милливольтах на единицу ускорения.
Если датчик подвергается хотя и периодическим колебаниям, но содержащим высшие гармонические колебания, то показания его будут отличны от действительного значения амплитуды испытываемого им ускорения.
В приборостроении и авиации часто ускорение измеряют и указывают не в единицах системы СИ (м/с2), а в единицах, равных ускорению свободного падения, обозначая эту единицу буквой g. Говорят, например, что ракета взлетает с ускорением 9g, при этом подразумевается, что g - ускорение земного тяготения, то есть ускорение ракеты равно γ = 9 х 9,81 = 88,29 м/с2.
Шкалы акселерометров градуируются в амплитудных значениях синусоидально изменяющегося ускорения в единицах g. Результат измерения при помощи акселерометра запишется в таком, например, виде: γх = 5,5g. При этом нужно иметь в виду, что здесь γх - амплитуда измеряемого ускорения, a g - ускорение свободного падения.








