 2015-05-13
2015-05-13 1015
1015Маятником обычно называют твёрдое тело, способное под действием приложенных сил совершать колебания относительно какого-либо центра или оси. Если тип маятника специально не оговорен, то считается, что маятник совершает колебания под действием силы тяжести.
Простейший маятник представляет собой небольшое массивное тело, подвешенное на нити или укреплённое на конце лёгкого стержня длины l. Если по условиям эксперимента нить можно считать невесомой и нерастяжимой, а размерами тела можно пренебречь по сравнению с длиной нити, то маятник можно рассматривать как материальную точку, находящуюся на неизменном расстоянии от точки подвеса. Такой маятник называется математическим. На практике приведенные выше условия являются трудно выполнимыми, тело нельзя считать материальной точкой, и маятник называют в этом случае физическим.
Закон движения математического маятника можно получить из основного закона динамики для вращательного движения. Предположим, что масса тела равна m, длина нити l, а размерами тела по сравнению с длиной нити можно пренебречь. Если тело маятника отклонить от положения равновесия на малый угол a <= 5°, то это положение не будет устойчивым, и маятник начинает движение. Относительно точки подвеса O (рис. 86) момент силы натяжения нити равен 0, поскольку линия действия силы тяжести проходит через точку подвеса.
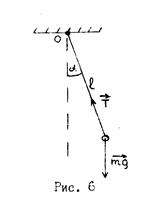
Момент же силы тяжести относительно точки подвеса отличен от нуля и равен m  . Поскольку при малых углах можно считать
. Поскольку при малых углах можно считать  , то выражение момента силы тяжести окончательны можно записать как
, то выражение момента силы тяжести окончательны можно записать как  . Знак '-' означает, что направление момента силы тяжести противоположно угловому отклонению маятника. Момент инерции для материальной точки равен
. Знак '-' означает, что направление момента силы тяжести противоположно угловому отклонению маятника. Момент инерции для материальной точки равен  . С учётом сказанного основной закон динамики для маятника принимает вид:
. С учётом сказанного основной закон динамики для маятника принимает вид:
Приведем дифференциальное уравнение к форме:
 (333)
(333)
Отметим, что это уравнение является уравнением гармонических колебаний. Решением его является гармоническая функция  . Циклическая частота, определяемая выражением
. Циклическая частота, определяемая выражением  , зависит от свойств самого маятника. Так как период колебаний связан с циклической частотой, то и его значение также определяется параметрами маятника и не зависит от начальных условий:
, зависит от свойств самого маятника. Так как период колебаний связан с циклической частотой, то и его значение также определяется параметрами маятника и не зависит от начальных условий:

Отметим также, что как само дифференциальное уравнение движения, так и его решение получены в предположении, что угловые отклонения маятника от положения равновесия малы. Если же угловые амплитуды будут больше указанной величины, то решение дифференциального уравнения не даст такой простой гармонической формы. Колебания не будут гармоническими.
Закон движения математического маятника можно представить и в несколько ином виде. Предположим, что отклонение тела маятника от положения равновесия по горизонтали равно x. Дифференциальное уравнение движения тела маятника запишем по второму закону динамики в проекциях на горизонтальное направление. Проекцию равнодействующей силы на горизонтальное направление можно определить как  . При малых отклонениях выполняется условие
. При малых отклонениях выполняется условие  Поэтому
Поэтому  , где знак "-" означает, что горизонтальная проекция равнодействующей силы направлена противоположно смещению l. С учётом сказанного дифференциальное уравнение движения можно представить в виде
, где знак "-" означает, что горизонтальная проекция равнодействующей силы направлена противоположно смещению l. С учётом сказанного дифференциальное уравнение движения можно представить в виде

Уравнение, как видно, также представляет собой дифференциальное уравнение гармонических колебаний, решением которого является гармоническая функция x=x0*sin(wt+j). Таким образом, линейные отклонения тела маятника от положения равновесия также изменяются по гармоническому закону с той же циклической частотой








