2015-05-26
2015-05-26 626
626Введение
Одним из важнейших факторов научно-технического прогресса, способствующих скорейшему совершенствованию общественного производства и росту его эффективности, является проблема повышения уровня подготовки специалистов.
Решению этой задачи способствует выполнение курсового проекта по «Деталям машин», базирующегося на знаниях физико-математических и общетехнических дисциплин: математики, механики, сопротивления материалов, технологии металлов, черчения.
Объектом курсового проектирования является одноступенчатый редуктор-механизм, состоящий из зубчатой передачи, выполненный в виде отдельного агрегата и служащий для передачи вращения от вала двигателя к валу рабочей машины.
Назначение редуктора - понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим валом.
Редуктор проектируется по заданной нагрузке (моменту на выходном валу) и передаточному числу без указания конкретного назначения, что характерно для специализированных заводов, на которых организовано серийное производство редукторов
Выбор электродвигателя и кинематический расчёт
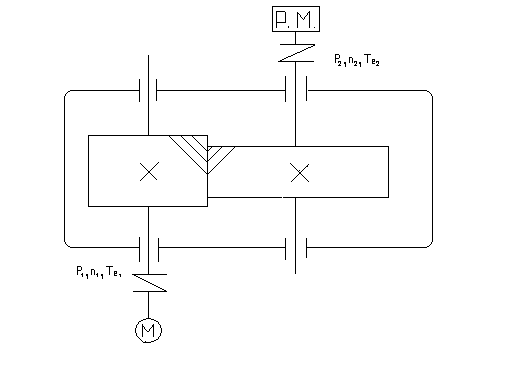
1.1 Составляем кинематическую схему
1.2 Определяем общий КПД редуктора
η = η3 · ηп2
где η3 –КПД пары зубчатых цилиндрических косозубых колёс;
η3=0,98;
ηп –КПД, учитывающий потери в одной паре подшипников качения;
ηп =0,99;
η =0,98·0,992= 0,96
1.3 Определяем мощность на ведущем валу
η =Р2/ Р1
Р1= Р2· η
Р1= 10 кВт
1.4 Определяем частоту вращения ведомого вала
U=n1/n2
n2 = n1/ U
n2=348мин-1
1.5 Подбираем электродвигатель по исходным данным, поскольку вал двигателя соединяется с быстроходным валом редуктора муфтой.
Р1=10 кВт;
n1=974.4 мин-1.
Примечание: при подборе мощности двигателя допускается его перегрузка до 5…8% при постоянной нагрузке и до 10…12% при переменной нагрузке [2,с.5]; отклонение частоты вращения вала двигателя от заданной допускается+3%[5,с.8].
Выбираем электродвигатель с номинальной мощностью равной или несколько превышающей Р1 и с угловой скоростью близкой к n1. Принимаем электродвигатель единой серии 4А тип 160S6, для которого:
Рдв=11кВт;
nдв=975 мин-1;
dдв= мм.
Окончательно принимаем:
Р1=10 кВт; n1 =974.4 мин-1.
1.6 Проверяем отклонение частоты вращения вала двигателя от заданной для быстроходного вала редуктора
(nдв – n1)/nдв· 100%
(975-974.4)/975·100%= 0.06%
Принимаем n1=974.4мин-1.
1.7 Определяем мощность на ведомом валу:
Р2 =Р1·η
Р2 = 9.6 кВт
1.8 Уточняем частоту вращения ведомого вала редуктора
U= n1/n2
n2 = n1/U
n2 = 348 мин-1
1.9 Определяем вращающие моменты на ведущем и ведомом валах Те1 и Те2
Те1=9,55 · Р1/ n1
Те1= 9,55· 10·10³/974.4 =98.01 Нм
Те2=Те1·U·η
Те2=263.4 Нм
1.10 Задаём число зубьев шестерни Z1, с целью уменьшения шума принимаем Z1≥25[4,с.314].
Принимаем Z1=25
1.11 Определяем число зубьев колеса Z2:
U= Z2/Z1
Z2 = U · Z1
Z2 = 70
1.12 Задаёмся предварительно углом наклона зуба согласно рекомендации β =8º -20º для косозубых передач.
Принимаем β=10º.