 2015-05-26
2015-05-26 2577
25771. Электромагниты с втягивающимся якорем (рис 4.4). В зависимости от формы магнитопровода они подразделяются
а) с U образным магнитопроводом

 здесь Fэм создаётся только рабочим потоком.
здесь Fэм создаётся только рабочим потоком.
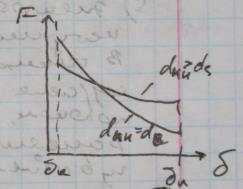
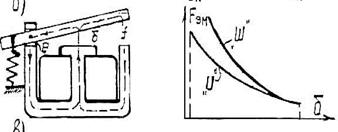
Поэтому: 1) Fэм создаётся рабочим Фδ. 2) Fэм при срабатывании нарастает по гиперболе, однако экспериментальные исследования показали, что с ↓δ эл магнитная хар-ка всё более отклоняется от закона гиперболы в сторону ↓ Fэм. Это объясняется тем, что с ↓δ магнитная система насыщается в результате  .
.
Регулирование эл магнитные силы путём изменения диаметра полюсного наконечника при δ=δн 

при δ=δк  практически не изменяется, не зависит он наличия полюсного наконечника.
практически не изменяется, не зависит он наличия полюсного наконечника.
б) С Ш образной магнитной системой
В процессе срабатывания происходит перераспределение потоков.
 В
В  - создаётся Fэм. доп, когда ↑ весь поток как и в U образной системе. Мэм будет ещё более ↑ из- за↑ плеча силы.
- создаётся Fэм. доп, когда ↑ весь поток как и в U образной системе. Мэм будет ещё более ↑ из- за↑ плеча силы.
в) Электромагниты с подковообразной магн системой и двумя катушками.
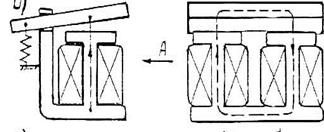
Достоинства - даёт поток Ф рабочий через два зазора, а значит нет паразитного зазора. Недостатки IWср- повышенное, поэтому меньшая чувствительность.
г) Электромагниты с цилиндрической магн системой не имеют паразитных зазоров поэтому развивают большие усилия при ↓δ. Нашли применение в качестве ударных магнитов и Эл магнитных муфтах.
д) 
 >>
>>  при конечном δ. Данные магниты за счёт
при конечном δ. Данные магниты за счёт  имеют повышенную чувствительность.
имеют повышенную чувствительность.
e) Клапанные электромагниты благодаря простоте и технологичности, удобству регулирования Fэм=f(δ) повышенной чувствительности, быстродействию нашли широкое применение в реле и др устройствах.
2. Электромагниты с втягивающимся якорем. в них кроме Фраб, имеется Фs1 с якоря Фs2, кот. замыкаются на станине.
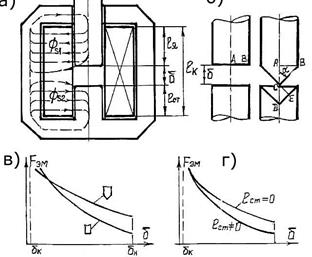

Фs1 существенно ↑Fэм при повышенных δ до 30%, при ↓δ  >>
>>  1 добавка Fэм от Фs1 становится =0.
1 добавка Fэм от Фs1 становится =0.
Основной способ регулирования крутизны характеристики путём изменения угла конусности полюсов α Fэм.н ↑ из-за ∟α↓ значит ↑S полюса в 1/sinα раз. А значит проводимость Gδ↑ в 1/sinα2 раз. Сопротивление стали постоянно значит Fэм.к= const.
Втягивающие эл магниты применяются в качестве силовых.
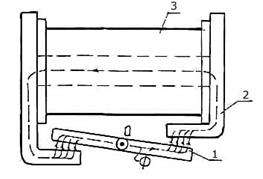 3. Эл магниты с уравновешенным якорем.
3. Эл магниты с уравновешенным якорем.
а) Ось вращения якоря проходит через центр его массы в результате эл магниты характеризуются повышенной вибростойкостью, стойкость к линейным ускорениям важно для эл магнитов работающих на подвижном транспорте.
б) Они имеют меньшие габариты, ↓Фs ↑ чувствительность сравнению с клапанными. Дальнейшее развитие – с внутри катушечным якорем. что позволило ещё большее ↓ габариты и ↑ чувствительность магнита.
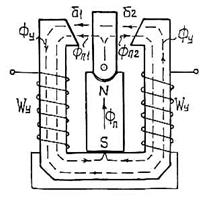 4. Полярные эл магниты.
4. Полярные эл магниты.
В отличие от неполярных реагируют на полярность входного сигнала, при одной полярности в одну строну, а при другой в другую; в качестве примера принцип действия одного из реле.
Срабатывающий стержень на базе постоянного магнита который создаёт поляризующий поток Фп1, этот поток выйдя и постоянного магнита разбивается на 2 потока.
 и
и 
Если якорь в нейтральном положении, то  =
=  сила действующая на якорь=0.
сила действующая на якорь=0.
При подаче управляющего сигнала обмотки Wу создаёт управляющий поток Фу, который будет замыкаться по крайним стержням не заходя в средний стержень. При этом первом зазоре Фу будет складываться с Фп, а в другой вычитаться. В результате возникает Fрез, которая будет направлена к тому полюсу под которым потоки складываются.
При притянутом якоре к одному из полюсов управляющий сигнал можно убрать, якорь будет удерживаться Fэм от потока Фп.

 - отклонение якоря от нейтрального положения.
- отклонение якоря от нейтрального положения.

Чтобы ↑ чувствительность реле нужно ↓Фп, ↓Х, а чтобы мощное реле надо ↑ Фп и ↑Х. В данном случае проявляется общая закономерность всех устройств.
 Рассмотренный эл магнит является двух стабильным, он имеет два стабильных положения. чтобы получить 1 стаб положение- возвратная пружина.
Рассмотренный эл магнит является двух стабильным, он имеет два стабильных положения. чтобы получить 1 стаб положение- возвратная пружина.
Полярные эл магниты по сравнению с нейтральными хар-ся 1) чувствительностью по отношению к полярности сигнала. 2) обладают высокой чувствительностью, мощность срабатывания на порядок ниже. 3) большое быстродействие. 4) импульсное управление, что снижает мощность управления.
Недостатки Меньшая Рвых, повышенная сложность и стоимость.
Применяются 1) В качестве ЭП поляризованного реле. 2) В устройствах проводной связи.
Fэм=f(δ) рассчитывается из условия постоянства тока катушки. Называется статической электромагнитной тяговой характеристикой., расчет её ведётся по энергетической формуле. А при конечном положении якоря – по формуле Максвелла. Знание Fэм=f(δ) необходимо для оценки надежности работы эл. магнита. Эл. магниты надёжно срабатывают, если Fэм=f(δ) рассчитывается при min возможном U. U=0.85Uном и горячем состоянии обмотки R=Rгор идёт выше противодействующей характеристики Fпр=φ(δ). Даже касание этих характеристик недопустимо, т.к Fэм=f(δ) нарастает по статической, а не динамической характеристике. Слишком увеличивать её нельзя так как ↑ удар, ↑ износ магнитной системы, ↑ масса и габариты.
Она будет согласована, если δ=δкр, Fэм.кр=Кз*Fпр.кр.
Под δкр понимается такой δ при котором электро магнитная система характеристика которой наиболее близко подходит противодействующей характеристике.
Кз=1,2…1,5 для маломощных, Кз=1,5…3 для реле.
Взаимное расположение характеристик Мэм и Мпр определяет один из важнейших параметров электромагнитов
 коэффициент возврата.
коэффициент возврата.
 ,
,  ,
,  ,
,  - напряжения и токи при возврате и срабатывании.
- напряжения и токи при возврате и срабатывании.
Это такие значения U и I катушки при которых Эл магнит ещё срабатывает, характеристика проходит выше противодействующей (кривая 2).
 ,
,  - напряжение и ток возврата - это наибольшее U и I катушки, при котором электромагнит возвращается в исходное положение.
- напряжение и ток возврата - это наибольшее U и I катушки, при котором электромагнит возвращается в исходное положение.
 Квозв - определяет ширину петли релейной характеристики электромагнита.. Можно показать, что при δ=δкр и I=Iкр то, Fэм.к=К*Iср2. а при δ=δк и I=Iв, то Fэм.к=К*Iв2
Квозв - определяет ширину петли релейной характеристики электромагнита.. Можно показать, что при δ=δкр и I=Iкр то, Fэм.к=К*Iср2. а при δ=δк и I=Iв, то Fэм.к=К*Iв2
К - коэффициент зависящий от геометрии магнита.
 - превышение эл. магнитной характеристики при Iср над противодействующей при притянутом конечном положении якоря
- превышение эл. магнитной характеристики при Iср над противодействующей при притянутом конечном положении якоря  <1. Для ↑Кв необходимо ↓
<1. Для ↑Кв необходимо ↓  это достигается 1)выполнение эл магнита с более пологой хар-кой. 2) ↑ конечного зазора δк с помощью неферромагнитных прокладок или штифтов. 3) Fпр.к начального положения возвратной пружины.
это достигается 1)выполнение эл магнита с более пологой хар-кой. 2) ↑ конечного зазора δк с помощью неферромагнитных прокладок или штифтов. 3) Fпр.к начального положения возвратной пружины.








