2015-05-26
2015-05-26 1249
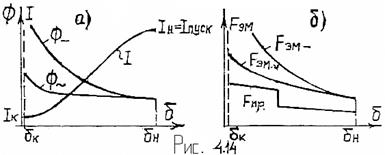
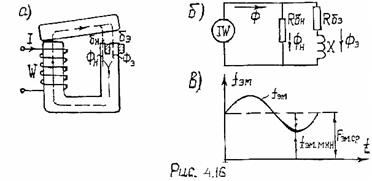
1249I, Ф, FЭМ = f(δ) электромагнитов переменного и постоянного тока.
В сравнении с ЭМП в ЭМТ при синусоидальном напряжении и отсутствии насыщения магнитной системы ток и поток изменяются по закону синуса. Особенности:
1) В магнитопроводе ЭМТ потери на гистерезис и вихревые токи. В результате магнитное сопротивление стали возрастает, при этом удельное сопротивление стали  будет состоять из активной составляющей
будет состоять из активной составляющей  и реактивной составляющей
и реактивной составляющей  обусловленной потерями в стали.
обусловленной потерями в стали.
 – справочнике.
– справочнике.
Расчёт цепи ведётся в комплексной форме. Для уменьшения потерь в стали и следовательно магнитную систему шихтуют и выполняют из стали с повышенным удельным сопротивлением.
2)  (рис.4.14)
(рис.4.14)  анализ с помощью закона Ома.
анализ с помощью закона Ома.

Неполное включение при переменном токе опасно.



При неизменном напряжении сети магнитный поток не зависит от величины зазора, это обеспечивается током катушки.



 при изменении воздушного зазора.
при изменении воздушного зазора.
3)  рис 4.13
рис 4.13

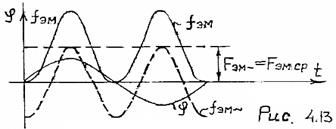 Вывод:
Вывод:
·  – не меняет своего направления.
– не меняет своего направления.
· – можно разложить на 2-е составляющие переменную изменяющуюся с двойной частотой относительно частоты сети и постоянную составляющую равную  .
.
 .
.
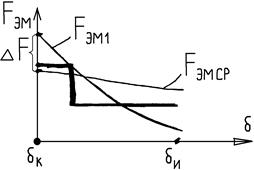
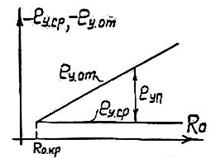
4) Статическая тяговая характеристика  и сравнение ЭМП и ЭМТ по
и сравнение ЭМП и ЭМТ по  .
.

где  – коэффициент рассеивания магнитной системы, который при изменении
– коэффициент рассеивания магнитной системы, который при изменении  от
от  до
до  изменяется незначительно.
изменяется незначительно.  поэтому
поэтому  – изменяется незначительно (пологая).
– изменяется незначительно (пологая).


Т.о. крутизна значительно меньше крутизны ЭМП.

 с
с 

 с
с 
1) 
2) 
при притянутом положении якоря
для преодоления одной  будет иметь меньшую материалоёмкость (
будет иметь меньшую материалоёмкость ( обмотки) чем электромагнит постоянного тока, это особенно справедливо при больших ходах
обмотки) чем электромагнит постоянного тока, это особенно справедливо при больших ходах  . При малом ходе
. При малом ходе  предпочтительнее электромагнит постоянного тока.
предпочтительнее электромагнит постоянного тока.
 ЭМТ позволяет иметь большой коэффициент возврата до 0,7, который будет тем больше, чем меньше превышение электромагнитной характеристики
ЭМТ позволяет иметь большой коэффициент возврата до 0,7, который будет тем больше, чем меньше превышение электромагнитной характеристики  над противодействующей характеристикой при . (см. § 4.5) Столь высокий коэффициент возврата позволяет
над противодействующей характеристикой при . (см. § 4.5) Столь высокий коэффициент возврата позволяет  осуществлять защиту двигателей от недопустимого снижения напряжения.
осуществлять защиту двигателей от недопустимого снижения напряжения.
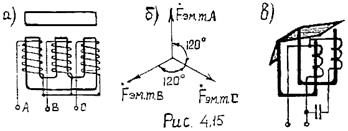
Для уменьшения вибрации рис. 4.16а, 4,15а. Принцип действия к.з.– витка по Л.Р. №2.
 и
и  в отличии от
в отличии от  не однозначно, т.к. оно зависит от фазы напряжения в момент включения или отключения электромагнита. Если считать цепь электромагнита чисто индуктивной, т.е. ток сдвинут от напряжения на угол 900, то при начальной фазе U,=0 пусковой ток будет содержать апериодическую составляющую.
не однозначно, т.к. оно зависит от фазы напряжения в момент включения или отключения электромагнита. Если считать цепь электромагнита чисто индуктивной, т.е. ток сдвинут от напряжения на угол 900, то при начальной фазе U,=0 пусковой ток будет содержать апериодическую составляющую.
 ;
;  ;
;  ;
;  .
.
 Учитывая, что
Учитывая, что 
 . Это объясняет высокое быстродействие .
. Это объясняет высокое быстродействие .
15. Электромагнитная сила в электромагнитах. Формула Максвелла и энергетическая формула.
В электрических аппаратах наибольшее применение нашли электромагниты.
Формула Максвелла показала что Fэм действуя на ферромагнитный контур

S - поверхность полюса взаимодействующая с магнитным потоком имеющемся в Вδ
Формула Максвелла используется в случае равномерного поля (при притянутом якоре).
Энергетическая формула, она получена из известного соотношения Fэд действующей в контуре с током

Fэм - в электромагнитах можно рассчитать как результат взаимодействия микротоков в якоре с микротоками в сердечнике, поэтому природа Fэм и Fэд одинакова

при постоянном IW в поцессе срабатывания
При не насыщенной магнитной системе когда IWстали=0 то
При насыщенной магнитной системе
IW=IWстали(=0)+IWδ
16. Автоматический выключатель (АВ). Выбор автоматического выключателя для защиты асинхронного двигателя.
Алгоритм выбора автомата. I. определение рабочих параметров автомата и условий в которых он будет работать. Определяется Uраб, Iраб, Iоткл, Iкз, итд и параметры обратной связи. II. Выбор автомата производится путем сопоставления рабочих параметров с номинальными параметрами впуска6емых автоматов, которые в паспортных данных.
1) Выбор автомата из условий надёжной работы в номинальном режиме UНОМ>Uраб, IНОМ>IРАБ. 2) Выбор автомата из условий надёжной работы при КЗ Iотк>Iкз- проверка на отключающую способность. 3) Выбор расцепителя а) РП, РТ из условия защиты двигателя от недопустимых перегрузок с учётом отстойки от пусковых токов. Он будет защищать движок если его зависимости от тока участок ВТХ пойдёт чуть ниже зависимости tдоп=f(Iдв).
Выбирают автомат с таким расцепителем, чтобы их Iрц.ном>Iдв.ном при этом полученная защита обеспечивается если удается подобрать автомат с рц. Iрц.ном= Iдв.ном. tпуск<tср.рц<1.5tпуск.тока. tпуск=(0,5…2) с для условий лёгкого пуска, когда двигатель раскручивает механизм с низкой инерционностью. tпуск=(5…10)с с высокой инерционностью.
Время срабатывания зависит от типа расцепителя: РТ (тепловой) I=6Iрц.ном tср=(8…20)с. РП при I=6Iрц.ном tср=(4…16)с можно регулировать.
б) Выбор расцепителя (эл магнитный РЭ, РП) из условия защиты двигателя при КЗ. Выбор расцепителя производится таким же образом с отстойкой от пусковых токов. Для этого подбирается токовый max расцепитель, чтобы его Iср.о>Iдв.пуск. Пусковой ток двигателя состоит из периодической составляющей, которая практически остаётся постоянной и апериодической которая затухает через (2-3)T, котограя моет зависеть от фазы пуска.
В(аналогично): Iср.о=Кн*Iдв.пуск.пер. Кн- коэффициент наёджности отстойки от пусковых токов который учитывает наличие 1) Апериодической составляющей в кривой тока 2) возможное повышение напряжения 3) Разброс параметров
Кн зависит от типа автомата и расцепиткеля.
17. Транзисторное реле с ОС по напряжению. Эл. схема, принцип действия, характеристика управления iн = f(eУ).
 Эл схема на рис 6.3. с принятым положительным направлением токов и напряжений. ОС по U осуществляется путём подачи Uвых=Uкэ2 на вход усилителя RОС=R0. Поскольку вых сигнал снимается с коллектора VT2 и подаётся на вход усилителя параллельно ЕУ, то такая ОС называется коллекторной или параллельной. Данная ОС является ПОС, то есть усиливает действие входного сигнала. еу↓. Iу↓- VT1 призакроется →Uкэ1↑→Iб2↑→VT2
Эл схема на рис 6.3. с принятым положительным направлением токов и напряжений. ОС по U осуществляется путём подачи Uвых=Uкэ2 на вход усилителя RОС=R0. Поскольку вых сигнал снимается с коллектора VT2 и подаётся на вход усилителя параллельно ЕУ, то такая ОС называется коллекторной или параллельной. Данная ОС является ПОС, то есть усиливает действие входного сигнала. еу↓. Iу↓- VT1 призакроется →Uкэ1↑→Iб2↑→VT2
 приоткроется → Uкэ2↓ VT2 ещё более призакроется →φ1 на эммитрерном переходе ≈0. На рис 6.4. (а) исходная хар- кА управления без ОС Iб1= Iу+ Iо, так как VT управляется током, то введение ОС те же выходные параметры п.п. реле, что и без ОС будут по
приоткроется → Uкэ2↓ VT2 ещё более призакроется →φ1 на эммитрерном переходе ≈0. На рис 6.4. (а) исходная хар- кА управления без ОС Iб1= Iу+ Iо, так как VT управляется током, то введение ОС те же выходные параметры п.п. реле, что и без ОС будут по 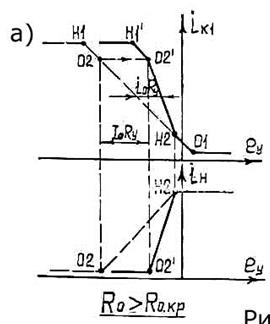 лучены при прежнем Iб1, то есть при Iу меньшем на величину Iо. При этом будет меньше еу.
лучены при прежнем Iб1, то есть при Iу меньшем на величину Iо. При этом будет меньше еу.  то есть характеристика сместится в право, но Iо=f(еу);1) VT2 находится в отсечке
то есть характеристика сместится в право, но Iо=f(еу);1) VT2 находится в отсечке  ,
,  , то есть участки характеристики управления 1 ого и 2 ого каскадов соответствующие режиму отсечки VT2 (левее точки О2 смещается в право на величину
, то есть участки характеристики управления 1 ого и 2 ого каскадов соответствующие режиму отсечки VT2 (левее точки О2 смещается в право на величину  . 2) VT2 находится в активной зоне. По мере приближения к режиму насыщения VT2 φ2 ↓ в результате
. 2) VT2 находится в активной зоне. По мере приближения к режиму насыщения VT2 φ2 ↓ в результате  . По этому по мере приближения VT2 к насыщению характеристики каскадов с ОС сближаются с хар-ками без ОС. 3) VT2 в насыщении, в этом режиме
. По этому по мере приближения VT2 к насыщению характеристики каскадов с ОС сближаются с хар-ками без ОС. 3) VT2 в насыщении, в этом режиме  доли вольта, поэтому
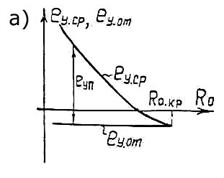
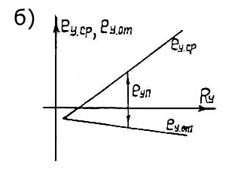
доли вольта, поэтому  . Значит участки хар-ки левее точки Н2 при введении ОС практически не изменяются. Введение ПОС увеличивает крутизну участков хар соответствующих активной зоне. Крутизна характеристик будет тем выше чем глубже ОС, ↑ОС достигается ↓Rо. При Rо< Rо.кр знак крутизны изменяется и усилитель переходит в релейный режим работы (6.4 б). Для рассматриваемой схемы Rо.кр= Rу- внутреннее сопротивление упр сигнала. 1 Если управление усилителем от источника U, когда Rу→0, то Rо.кр→0 в результате в усилителе релейного режима не выполнимо. 2 Если управление ведётся от источника тока тогда Rу→∞, Rо.кр→ ∞ тогда условие релейного режима можно выполнить. П.П.р с ОС по U хорошо согласуются с источником тока и не согласуются с источником U.
. Значит участки хар-ки левее точки Н2 при введении ОС практически не изменяются. Введение ПОС увеличивает крутизну участков хар соответствующих активной зоне. Крутизна характеристик будет тем выше чем глубже ОС, ↑ОС достигается ↓Rо. При Rо< Rо.кр знак крутизны изменяется и усилитель переходит в релейный режим работы (6.4 б). Для рассматриваемой схемы Rо.кр= Rу- внутреннее сопротивление упр сигнала. 1 Если управление усилителем от источника U, когда Rу→0, то Rо.кр→0 в результате в усилителе релейного режима не выполнимо. 2 Если управление ведётся от источника тока тогда Rу→∞, Rо.кр→ ∞ тогда условие релейного режима можно выполнить. П.П.р с ОС по U хорошо согласуются с источником тока и не согласуются с источником U.
 ,
,  рис 6.5 (а)
рис 6.5 (а)
Из характеристик управления видно, это определяется положением точки  (рис 6.4 б).
(рис 6.4 б).
Сдвиг т. происходит под действием  на величину
на величину  ,
,  .
.
 определяется положением точки
определяется положением точки  , в которой VT2 находится в режиме насыщения
, в которой VT2 находится в режиме насыщения  независимо от величины
независимо от величины  , поэтому сдвига точки нет и не зависит от .
, поэтому сдвига точки нет и не зависит от .  характеризует ширину релейной характеристики и определяет
характеризует ширину релейной характеристики и определяет  .
.
 . При
. При  . При
. При  ,
,  ,
,  ; при
; при  релейный режим прекращается.
релейный режим прекращается.
 Зависимость и
Зависимость и  на рис 6.5 (б). БТ управляется током, то значение
на рис 6.5 (б). БТ управляется током, то значение  VT1 и
VT1 и  при срабатывании и возврате не зависят от
при срабатывании и возврате не зависят от  тока
тока  и
и  контактного реле не зависит от сопротивления цепи управления. в момент ср. и возврвта будет постоянным не зависимо от .
контактного реле не зависит от сопротивления цепи управления. в момент ср. и возврвта будет постоянным не зависимо от .  ;
;  ;
;  ;
;  . Поэтому с
. Поэтому с  модули
модули  ;
;  . Различные U из за того, что возвращение происходит более интенсивно, из-за влияния на реальный ток –
. Различные U из за того, что возвращение происходит более интенсивно, из-за влияния на реальный ток –  , протекающий через вход реле (эмиттерный) переход VT1.
, протекающий через вход реле (эмиттерный) переход VT1.
Т.о. возрастание обусловлено 2-мя причинами:  и ОС
и ОС  , поэтому идёт круче; обусловлено только 1 причиной .
, поэтому идёт круче; обусловлено только 1 причиной .
18. Транзисторное реле с ОС по току. Эл. схема, принцип действия, характеристика управления iH = f(eУ).

Эл. Схема с принятыми “+” направлениями i и U на рис 6.6
В усилителе ОС по i осуществляется включением резистора ОС – в эммитерные цепи обоих VT, при этом  проходя по создаёт падение
проходя по создаёт падение  ,
,  . Это напряжение является
. Это напряжение является  , т.к. включён в цепь эмиттеров VT, а включено последовательно с источником управляемого сигнала
, т.к. включён в цепь эмиттеров VT, а включено последовательно с источником управляемого сигнала  , то данная обратная связь называется эмиттерной или последовательной. Принцип действия аналогичен усилителю с ОС по U.
, то данная обратная связь называется эмиттерной или последовательной. Принцип действия аналогичен усилителю с ОС по U.
1. Рассмотренная ОС также является ПОС, т.е. сигнал ОС усиливает действие входного сигнала.  , то
, то  – VT1 призакроется следовательно
– VT1 призакроется следовательно  –
–  – VT2 приоткроется –
– VT2 приоткроется – 

 –
–  . – является всегда запирающим. VT1 еще больше призакрылся.
. – является всегда запирающим. VT1 еще больше призакрылся.
2. всегда + и является запирающим VT1. на рабочем участке характеристики должно быть поэтому “–” т.к. она должна создать отпирающее U на эмиттерном переходе VT1, поэтому ОС сдвигает характеристику влево на величину . для создания прежнего и следов-но прежнего  неоходимо скомпенсировать “+” , т.е. она должна в отрицательную сторону.
неоходимо скомпенсировать “+” , т.е. она должна в отрицательную сторону.

3. ,  , чем
, чем  , - низко Ом,
, - низко Ом,  . Эта зависимость на рис 6.8 (а)
. Эта зависимость на рис 6.8 (а)
4. , на рис 6.8 (б)
Отл. Крутизна  , чем , т.к влияет на ОС, с ОС, с ОС падает.
, чем , т.к влияет на ОС, с ОС, с ОС падает.

 , чем ,
, чем ,  , т.е
, т.е  уменьшается сдвиг т. Н2 влево, -
уменьшается сдвиг т. Н2 влево, -  , изменение
, изменение
вызывали два фактора: 1) при  2) при – – . На влияет только 1-ый фактор.
2) при – – . На влияет только 1-ый фактор.
Сравнение этих реле.
ПР с ОС U: характеризуется 
 повышенный;
повышенный;  повышенный;
повышенный;
ПР с ОС по I:
 повышенный;
повышенный;  повышенный.
повышенный.
Выводы: 1) по кратности изменения тока  схемы практически одинаковы 2) ПР с ОС U
схемы практически одинаковы 2) ПР с ОС U  ; ПР с ОС I
; ПР с ОС I  , то эти реле по основным параметрам по
, то эти реле по основным параметрам по  , по
, по  ,
,  ,
,  ,
,  . Схемы одинаковы 3) применение той или иной схемы определяется характером источника управляемого сигнала, а именно если управление ведётся от источника близкого к источнику U
. Схемы одинаковы 3) применение той или иной схемы определяется характером источника управляемого сигнала, а именно если управление ведётся от источника близкого к источнику U  , то следует отдавать предпочтение ПР м ОС I. Если управление ведётся от источника I
, то следует отдавать предпочтение ПР м ОС I. Если управление ведётся от источника I  , то следует применять ПР с ОС U.
, то следует применять ПР с ОС U.
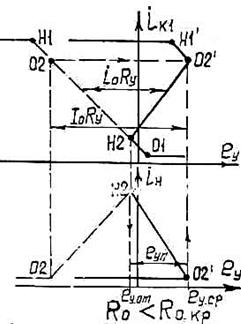
19. Полупроводниковое реле с релейным органом на логических элементах. Эл. схема релейного органа, принцип действия, характеристика управления Uвых = f(ey).
Основные параметры логических элементов на основе МОП структуры: 1) RВХ=∞; 2)Rвых≈0; 3) Uвых≈Uпит≈0; 4) Пороговое напряжение Uпор≈0,5Uпит
 Здесь релейный орган РО реализуется на двух последовательно соединенных логических элементах (ЛЭ). При этом выход реле соединяется с входным делителем R1,R2, который образует цепь обратной связи. В сопротивление R1 включено внутреннее сопротивление источника. Релейный гистерезисный вид характеристики управления схемы обеспечивается зависимостью напряжения на входе первого логического элемента UВХ от выходного напряжения UВЫХ. UВЫХ при переключении меняется скачком. Uвых=
Здесь релейный орган РО реализуется на двух последовательно соединенных логических элементах (ЛЭ). При этом выход реле соединяется с входным делителем R1,R2, который образует цепь обратной связи. В сопротивление R1 включено внутреннее сопротивление источника. Релейный гистерезисный вид характеристики управления схемы обеспечивается зависимостью напряжения на входе первого логического элемента UВХ от выходного напряжения UВЫХ. UВЫХ при переключении меняется скачком. Uвых=  ≈UП; Uвых=
≈UП; Uвых=  ≈0 при переключении UВХ1 меняется на величину ∆UВХ1;
≈0 при переключении UВХ1 меняется на величину ∆UВХ1;
РАБОТА СХЕМЫ РЕЛЕ:  При малом сигнале управления еу, когда Uвх1< Uпор, логичес-кие элементы остаются в исходном состоянии, при котором Uвых= ≈0. В этом состоянии напряжение Uвх1 линейно нарастает при увеличении сигнала управления еу.
При малом сигнале управления еу, когда Uвх1< Uпор, логичес-кие элементы остаются в исходном состоянии, при котором Uвых= ≈0. В этом состоянии напряжение Uвх1 линейно нарастает при увеличении сигнала управления еу.  - закон изменения напряжения на входе первого логического элемента
- закон изменения напряжения на входе первого логического элемента
Когда Uвх1 достигает порогового значения, т.е. Uвх= Uпор=0,5Uпит (*) происходит переключение логических элементов и на выходе РО появляется сигнал высокого уровня Uвых=  =UП. Напряжение срабатывания определяется из (*):
=UП. Напряжение срабатывания определяется из (*):  . Новое устойчивое состояние сохранится, пока Uвх1>Uпор. По методу суперпозиций:
. Новое устойчивое состояние сохранится, пока Uвх1>Uпор. По методу суперпозиций:
 ; ;
; ; 
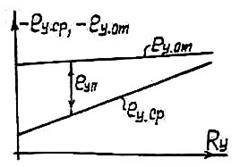
еу.п= еу.ср – еу.в = UП∙(R1/R2)
Регулирование: 1) Путём суммирования R1 и R1; 2) Независимое регулирование напряжения срабатывания и возврата – достигается путем разделения цепи обратной связи для начального и конечного состояний с помощью диодов и сопротивлений (на. рис) 
ИЗМЕНЕНИЕ ХАР-КИ УПРАВЛЕНИЯ: 1)рис: 2) увеличить R2 → уменьшится ширина петли
20. Полупроводниковое реле с релейным органом на операционном усилителе. Эл. схема релейного органа, принцип действия, характеристика управления Uвых = f(ey).
При необходимости создания полупроводниковых реле с повышенной стабильностью и точностью напряжений срабатывания и возврата еу.ср и еу.в, релейный орган выполняется на операционном усилителе (ОУ). ОУ – это дифференциальный усилитель постоянного тока с критически идеальными параметрами: коэффициент усиления Ку→∞, Rвх→∞, Rвых→0; перевод ОУ в релейный режим работы осуществляется введением положительной обратной связи, путём подачи напряжения обратной связи Uос на его прямой вход. Характеристика управления неинвертирующего ОУ (сигнал управления подается на прямой вход). Переключение ОУ происходит в момент равенства: Uнн= Uпр. Разные напряжения срабатывания и напряжения возврата обеспечиваются скачкообразным изменением напряжения обратной связи UОС, т.е. напряжением на одном из входов (прямом). Выходное напряжение ОУ Uвых.ОУ.мах≈ Uпит.
Электрическая схема замыкающего РО: 
 При срабатывании выходное напряжение Uвых меняется от минимального значения до максимального. На схеме UОС формируется на резисторе R5 делителя напряжен. R4 - R5 и подаётся на прямой вход ОУ. НА этот же вход подаётся управляющий сигнал еу, т.е. релейный орган РО выполнен на неинвертирующем ОУ. На инвертирующий вход подаётся напряжение смещения UСМ, которое формируется на резисторе R1 делителя напряжения R1 – R2; сам делитель подключен к «+» шине источника питания. Напряжение на инвертирующем входе
При срабатывании выходное напряжение Uвых меняется от минимального значения до максимального. На схеме UОС формируется на резисторе R5 делителя напряжен. R4 - R5 и подаётся на прямой вход ОУ. НА этот же вход подаётся управляющий сигнал еу, т.е. релейный орган РО выполнен на неинвертирующем ОУ. На инвертирующий вход подаётся напряжение смещения UСМ, которое формируется на резисторе R1 делителя напряжения R1 – R2; сам делитель подключен к «+» шине источника питания. Напряжение на инвертирующем входе 
При еу=0 UИН – UСМ положительное и по модулю UСМ> UПР и тогда это напряжение будет больше на прямом входе. Поэтому Uвых.ОУ будет отрицательным, Uвых.ОУ ≈ – UП, поэтому напряжение в точке 1: U1= – UСТ.VD1; Uвых.ОУ= – UСТ.пр = – UСТ2.
Uпр = UОС =  ; при увеличении сигнала управления еУ напряжение на прямом входе Uпр будет линейно возрастать по соотношению будет равно:
; при увеличении сигнала управления еУ напряжение на прямом входе Uпр будет линейно возрастать по соотношению будет равно:
 , пока еУ< еУ.СР.
, пока еУ< еУ.СР.
При еУ=еУ.СР UИН = UПР, происходит переключение ОУ, в результате Uвых.ОУ = + UП, при этом скачком меняется напряжение на цепи ОС; U1= + UСТ; Uвых.ОУ = +UСТ;
UОС = ;  - скачком возрастает на 2UОС – это новое устойчивое положение релейного органа, которое сохраняется при всех значениях еУ >еУВ. Напряжение срабатывания и возврата определяются из условия переключения ОУ:
- скачком возрастает на 2UОС – это новое устойчивое положение релейного органа, которое сохраняется при всех значениях еУ >еУВ. Напряжение срабатывания и возврата определяются из условия переключения ОУ:  ;
;
 ;
;
напряжение возврата:
 ;
;  ;
;
Отсюда находим напряжении переключения: 
Регулирование еУ,еУВ осуществляется путем изменения сопротивления резистора R5
1) R5=0, UОС=0; UУП =0;
еУСР = еУВ = U*СМ;  -приведенное к напряжению управления, напряжение смещения.
-приведенное к напряжению управления, напряжение смещения.
2) R5 повышается (см. график).
Размыкающий релейный орган
При еУ =еУСР выходное напряжение с максимального значения, уменьшается до минимального значения. Релейный орган выполняется на базе инвертирующего ОУ. При этом делитель R1 – R2 цепи смещения подсоединяется к отрицательному полюсу источника питания (см. рис)
Принцип действия и характеристика управления РО:
1) еУ=0 напряжение на инвертирующем входе  , по модулю
, по модулю
UИН > UПР, тогда на выходе будет: Uвых.ОУ =UП. Напряжение в т.1: U1= UСТ, UВЫХ=UСТ;Напряжение на прямом входе:  ; при повышении еУ
; при повышении еУ  будет линейно нарастать при всех значениях еУ< еУ.СР.
будет линейно нарастать при всех значениях еУ< еУ.СР.
2) При еУ=еУ.СР UИН = UПР, происходит переключение ОУ. В результате Uвых.ОУ = – UП, U1= – UСТ, UВЫХ= – UСТ.ПР; При  - это состояние сохраняется до тех пор, пока еУ >еУВ. Напряжения еУСР и еУВ – определяются из условия срабатывания ОУ. Напряжение на инвертирующем входе:
- это состояние сохраняется до тех пор, пока еУ >еУВ. Напряжения еУСР и еУВ – определяются из условия срабатывания ОУ. Напряжение на инвертирующем входе: 
отсюда: 
Напряжение возврата: 
Отсюда находим напряжении переключения: 
Регулирование еУ.СР, еУВ, осуществляется путём изменения сопротивления R5.  1) R5=0; UОС=0; eуп = 0;
1) R5=0; UОС=0; eуп = 0;  ; 2)
; 2)