2015-05-30
2015-05-30 1747
17471. Основные режимы работы МК ATMEL. Структура регистра общего назначения.
· активный режим (Run mode) — основной режим работы МК. В этом режиме МК исполняет рабочую программу, и все его ресурсы доступны. Потребляемая мощность имеет максимальное значение PRUN. Большинство современных МК выполнено по КМОП-технологии, поэтому мощность потребления в активном режиме сильно зависит от тактовой частоты;
· режим ожидания (Wait mode, Idle mode или Halt mode). В этом режиме прекращает работу центральный процессор, но продолжают функционировать периферийные модули, которые контролируют состояние объекта управления. При необходимости сигналы от периферийных модулей переводят МК в активный режим, и рабочая программа формирует необходимые управляющие воздействия. Перевод МК из режима ожидания в рабочий режим осуществляется по прерываниям от внешних источников или периферийных модулей, либо при сбросе МК. В режиме ожидания мощность потребления МК PWAIT снижается по сравнению с активным режимом в 5…10 раз;
· режим останова (Stop mode, Sleep mode или Power Down mode). В этом режиме прекращает работу как центральный процессор, так и большинство периферийных модулей. Переход МК из состояния останова в рабочий режим возможен, как правило, только по прерываниям от внешних источников или после подачи сигнала сброса. В режиме останова мощность потребления МК PSTOP снижается по сравнению с активным режимом примерно на три порядка и составляет единицы микроватт.
Два последних режима называют режимами пониженного энергопотребления. Минимизация энергопотребления системы на МК достигается за счет оптимизации мощности потребления МК в активном режиме, а также использования режимов пониженного энергопотребления. При этом необходимо иметь в виду, что режимы ожидания и останова существенно отличаются временем перехода из режима пониженного энергопотребления в активный режим. Выход из режима ожидания обычно происходит в течение 3…5 периодов синхронизации МК, в то время как задержка выхода из режима останова составляет несколько тысяч периодов синхронизации. Кроме снижения динамики работы системы значительное время перехода в активный режим является причиной дополнительного расхода энергии.
Для хранения промежуточных результатов вычислений каждый микроконтроллер AVR имеет тридцать два регистра общего назначения (сокращенно — РОН). Для того, чтобы регистры можно было использовать в программе, каждый имеет свое собственное имя. Вот эти имена: R0, R1, R2 — R31.
Все РОН составляют так называемый файл регистров общего назначения. Все команды преобразования данных (сложения, вычитания и т. д.) микроконтроллера AVR построены таким образом, что обязательно используют РОН. Каждая команда в качестве операндов использует либо содержимое двух разных РОН, либо содержимое РОН и константу. Результат вычислений также помещается в один из РОН.
Регистры общего назначения используются также и в командах перемещения данных. Перемещать данные можно из одного РОН в другой, из РОН в ячейку памяти и в обратном направлении.
Некоторые команды имеют ограничения по использованию РОН. Например, все команды обмена информацией с регистрами ввода—вывода не могут использовать регистры R0—R15. Существуют и другие ограничения.
Все регистры общего назначения микроконтроллеров AVR восьмиразрядные. Однако шесть последних регистров (R26—R31) способны объединяться в регистровые пары. Такая пара в некоторых операциях выступает как самостоятельный шестнадцатиразрядный регистр. При этом не теряется возможность чтения каждого регистра пары отдельно. Регистровые пары имеют свои названия. Пара, объединяющая регистры R26—R27, называется регистром X. Пара регистров R28—R29 называется регистром Y. А пара регистров R30—31 называется регистром Z.
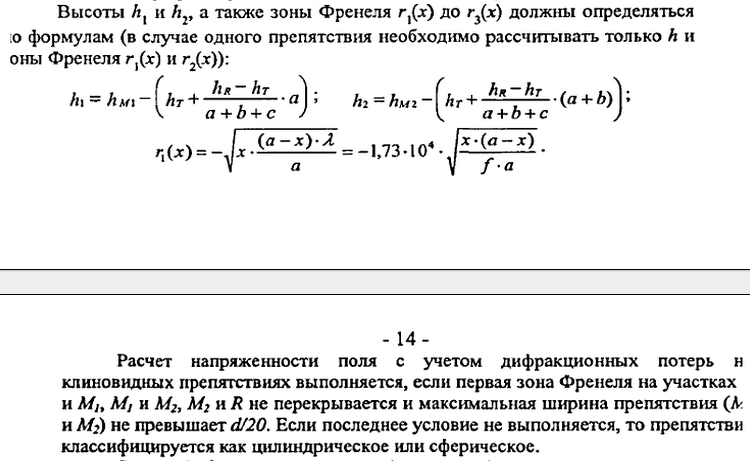
2. Методика расчета зон покрытия на основе детерминированной модели напряженности поля сигнала.
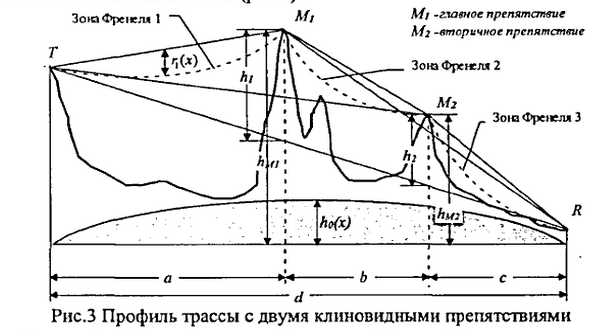 Детерминированная модель прогноза напряженности поля сигнала основана на общей теории дифракции и учитывает дифракционные потери на препятствиях различных типов. Эта модель требует построения профиля трассы С-ПО для каждой из возможных позиций ведения связи и автоматизации асчетов с использованием ГИС (рис.3).
Детерминированная модель прогноза напряженности поля сигнала основана на общей теории дифракции и учитывает дифракционные потери на препятствиях различных типов. Эта модель требует построения профиля трассы С-ПО для каждой из возможных позиций ведения связи и автоматизации асчетов с использованием ГИС (рис.3).