 2015-05-30
2015-05-30 409
409Пусть измерение z представляет собой аддитивную смесь истинного значения параметра y и погрешности измерений δ: z = y + δ.
Контролируемый параметр у описывается плотностью распределения f1(у). Значения априорных вероятностей исправного и неисправного состояний рассчитываются по формулам:
 ; 1-R0 =
; 1-R0 =  .
.
Формулы для расчета вероятностей ложного и необнаруженного отказов имеют следующий вид:
Рл.о =  ;
;
Рн.о =  ,
,
где  — совместная плотность вероятностей контролируемого параметра у и погрешности измерений
— совместная плотность вероятностей контролируемого параметра у и погрешности измерений  .
.
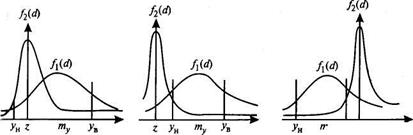
При независимых параметре и ошибке измерения совместная плотность представляет собой произведение: f(y, ) = f1(y)f2() и формулы для Рл.о и Рн.о примут вид (рисунок 1):
 (1)
(1)
 . (2)
. (2)
|
a) 6) в)
Рисунок 1 - Графики, поясняющие определение ошибок первого (а)
и второго (б, в) рода
В практике контроля систем ЛА наиболее часто принимается, что параметр у распределен по нормальному закону или по сильно усеченным законам, которые хорошо аппроксимируются равномерным распределением. Погрешности измерительных приборов в большинстве случаев также распределены по нормальным законам, а погрешности измерений, определяемые делениями шкалы отсчета, — но законам равной вероятности.
Рассмотрим три наиболее часто встречающихся случая возможных сочетаний законов распределения контролируемого параметра у и ошибки измерения .
1.2 Первый случай.
Контролируемый параметр и ошибка измерения распределены по нормальному закону:
 ; (3)
; (3)
 , (4)
, (4)
где my – математическое ожидание контролируемого параметра y;
 - среднеквадратическое отклонение параметра y;
- среднеквадратическое отклонение параметра y;  - среднеквадратическое отклонение погрешности измерения .
- среднеквадратическое отклонение погрешности измерения .
Проведем замену переменных: / = t; y – my / = z. В этом случае формулы (1) и (2) с учетом (3) и (4) принимают вид:
РЛ..О= Ф(кВ ) – Ф(кН )+ Р1 ; (5)
РН..О= Ф(кВ /  ) - Ф(кН / ) + Р1 , (6)
) - Ф(кН / ) + Р1 , (6)
где Ф(х) =  -интегральная функция стандартного нормального распределения (функция Лапласа);
-интегральная функция стандартного нормального распределения (функция Лапласа);
Р 1=  ;
;
kн=(yн – my)/ ; kв= yв – my / ;  .
.
Для симметричного относительно математического ожидания допуска
kв = - kн = k вероятности РЛ..О и РН..О определятся соотношениями:
РЛ..О = 2Ф(k) – Р2 ; (7)
РН..О = 2Ф(k /  ) – Р2, (8)
) – Р2, (8)
где Р2 =  Ф(z)dz.
Ф(z)dz.
Как следует из анализа приведенных выражений для вероятностей ложного и необнаруженного отказов, значения этих вероятностей полностью определяются шириной допуска k, значением априорной вероятности R0, а также соотношением дисперсии погрешности измерений и дисперсии контролируемого параметра. Значение вероятности R0 определяется требованиями к качеству функционирования систем и не может быть изменено. Следовательно, обеспечение приемлемых значений РЛ.. 0 и РН.. 0 может быть достигнуто путем подбора соответствующих средств измерений.
В случае, когда требования к точности оказываются нереализуемыми, обеспечение показателей достоверности контроля достигается либо проведением дублирующих измерений, либо введением контрольных допусков, отличных от эксплуатационных. При использовании дублирующих измерений в качестве результата измерения контролируемого параметра принимается его среднеарифметическое значение  =
=  , имеющее в п раз меньшую дисперсию, чем дисперсия средства измерения. Сужение контрольного допуска приводит к снижению вероятности необнаруженного отказа и увеличению вероятности ложного отказа, а его расширение — к увеличению РН..0 и снижению РЛ..О.
, имеющее в п раз меньшую дисперсию, чем дисперсия средства измерения. Сужение контрольного допуска приводит к снижению вероятности необнаруженного отказа и увеличению вероятности ложного отказа, а его расширение — к увеличению РН..0 и снижению РЛ..О.
На рисунке 2 приведены номограммы зависимостей вероятностей РЛ..О
и РН.. 0 от величины относительной ошибки измерения  для различных значений к. С помощью номограмм можно определить значения ошибок первого и второго родов, если известны статистические характеристики контролируемого параметра и погрешности измерения, а также задан допуск на контрольный параметр. Номограммы позволяют решать и обратные задачи. Например, как обеспечить заданную величину вероятностей ошибок РЛ..0 и РН.. 0 при известном относительном допуске к.
для различных значений к. С помощью номограмм можно определить значения ошибок первого и второго родов, если известны статистические характеристики контролируемого параметра и погрешности измерения, а также задан допуск на контрольный параметр. Номограммы позволяют решать и обратные задачи. Например, как обеспечить заданную величину вероятностей ошибок РЛ..0 и РН.. 0 при известном относительном допуске к.
Рисунок 2 - Зависимости РЛ..0 (а) и РН..0 (б) от для различных значений k при нормальном распределении у и
Пример. Пусть контрольный допуск равен к = ув – my / σy =2σу / σy = 2 и необходимо, чтобы в процессе контроля вероятность РН..0 не превысила 0,0031. Из номограммы следует, что эту задачу можно решить, подобрав соответствующим образом допустимую величину , что соответствует выбору аппаратуры контроля с соответствующими данному значению точностными характеристиками. В данном случае относительная погрешность измерения не должна превышать 0,08.








