 2015-06-04
2015-06-04 3741
3741Практическая потребность в контролировании параметров самых различных процессов, протекающих вокруг нас, привела к созданию устройств отражающих изменение параметров этих процессов в удобной для использования форме.
Преобразователь, преобразующий измеряемую величину в форму пригодную для использования в последующих частях системы, называют измерительным или входным преобразователем. Входной преобразователь, получающий энергию от измеряемой величины (среды) называют пассивным преобразователем, или чувствительным элементом – датчиком. При создании электронных приборов имеют дело с датчиками, преобразующими ту или иную физическую величину (перемещение, силу, расход, уровень, температуру, давление, скорость и т.д.) в электрический сигнал (ток или напряжение).
Практическая потребность в контроле самых разнообразных процессов привело к созданию большого многообразия датчиков. Датчики различаются и классифицируются, прежде всего, по типу измеряемого параметра и по виду физического процесса, лежащего в основе его действия. В таблице 1 перечислены наиболее распространенные типы датчиков и физические процессы, лежащие в основе их функционирования.
Таблица 1.
| Тип датчика | Процесс в основе действия датчика | |||||
| Температурные датчики | ||||||
| 1. Ртутный термометр | Увеличение объема при нагревании | |||||
| 2. Терморезисторы | Изменение сопротивления при нагреве | |||||
| 3. Термопары | Генерация термо-ЭДС | |||||
| 4. Термоферриты | Изменение магнитной проницаемости | |||||
| 5. Термоконденсаторы | Расширение при нагреве | |||||
| 6. Предохранитель | Изменение состояния вещества | |||||
| Оптические датчики | ||||||
| 1. Фотодатчики | Внешний фотоэффект (испускание  ) ) | |||||
| Внутренний фотоэффект (фотопроводимость) | ||||||
| Изменение электропроводности (GaAs, PbS, ZnS) | ||||||
| Фотогальванический эффект | ||||||
| Датчики давления | ||||||
| 1. Индукционные | Изменение индуктивности | |||||
| 2. Емкостные | Изменение емкости | |||||
| 3. Магнитострикционные | Изменение магнитной проницаемости | |||||
Различают датчики с прямым и косвенным преобразованием. В датчиках с косвенным измерением выходная величина формируется опосредованно, вследствие оценки действия измеряемой величины на некоторую промежуточную величину. К первым можно отнести фотоэлементы, терморезисторы. Ко вторым – измеритель массы, построенный по схеме «масса–деформация–сигнал», датчик обледенения, основанный на изменении освещенности при оседании инея.
Важнейшим параметром каждого датчика является форма его функции преобразования. Функцией преобразования (передаточной характеристикой) датчика называют зависимость между измеряемой величиной и выходным сигналом датчика. С этой точки зрения датчики делят на линейные и нелинейные, на датчики с положительной и отрицательной характеристиками, на датчики с релейной (критичной) характеристикой, с гистерезисом и без гистерезиса.
Для использования датчика вид его функции преобразования должен быть однозначно определен. Для измерения основных физических величин выпускаются и применяются типовые датчики. В идеале функции преобразования датчиков конкретного типа не должны отличаться друг от друга. Функция преобразования таких датчиков регламентируются соответствующими ГОСТами и соглашениями. Какова функция преобразования конкретного датчика можно узнать в соответствующих справочниках. В них она может задаваться графически, таблично или аналитически.
Графический способ представления функции преобразования датчика является самым наглядным, но определить поведение функции преобразования датчика с достаточно высокой точностью при его использовании невозможно. Табличный способ прост, но ненагляден. При аналитическом способе представления функции преобразования датчика (в виде математической функции) используется их аппроксимационное представле6ние в виде полиномиальной или дробно-рациональной функции. При таком представлении в справочнике достаточно указать лишь коэффициенты таких функций.
Основным требованием к функции преобразования любых датчиков (исключая релейные) является ее монотонность. Монотонность функции преобразования гарантирует однозначность, получаемой на его выходе величины, от входного воздействия. Датчиком, не обладающим монотонной функцией преобразования, пользоваться невозможно, потому что в случае использования такого датчика нельзя по получаемому на его выходе значению сигнала, определить какому именно значению измеряемой величины он соответствует. Это иллюстрируется рис..
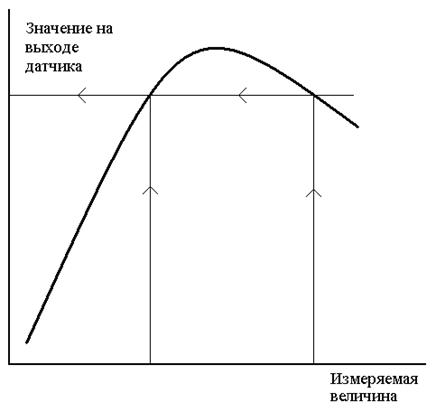
Рис. Неоднозначность измеряемой величины при немонотонной функции
преобразования датчика
Кроме этого, очень желательно чтобы функция преобразования датчика была линейной, т. е. чтобы его выходную величину и измеряемый параметр связывал постоянный масштабный коэффициент. Если функция преобразовании датчика будет линейной, то оценивать измеряемый параметр по выходному сигналу датчика будет максимально просто.
Если функция преобразовании датчика будет нелинейной, то для того чтобы определять измеряемый параметр по выходному сигналу датчика нужно будет учитывать эту нелинейность.
Конечно, измерения могут вестись с настолько низкой точностью, когда нелинейностью датчика можно пренебречь. При этом функцию преобразования датчика аппроксимируют прямой и считают ее линейной. Однако, если по условиям эксплуатации мы вынуждены использовать датчик с нелинейной функцией преобразования, а измерения должны производиться с высокой точностью от учета нелинейности функции преобразования датчика никуда не уйти.
Т. к. ставится цель по выходному сигналу датчика определять величину физической величины на его входе, то учет нелинейности сводится к реализации над выходным сигналом датчика функциональной зависимости обратной функции преобразования датчика. При этом говорят о линеаризации функции преобразования датчика.
Реализация такой функциональной зависимости может осуществляться уже после преобразования измеряемого сигнала в цифровую форму программно в цифровом микропроцессорном ядре измерительной системы. Естественно, при этом производительность микропроцессорного ядра должна быть такой, чтобы все преобразования над сигналом, в том числе и линеаразация, были закончены к началу очередного цикла измерения (дискретизации).
Линеаризация функции датчика может осуществляться аппаратными устройствами, включенными в измерительный канал. Такие устройства называют линеаризаторами, а в более общем случае – функциональными преобразователями.
Кроме монотонности и линейности датчики характеризуются и другими параметрами. В общем случае необходимо выделять статические и динамические характеристики датчиков. Статические характеристики описывают свойства датчиков в условиях работы с постоянными или медленно изменяющимися входными сигналами. Динамические параметры описывают их работу при быстроменяющихся входных сигналах.
К основным статическим параметрам, прежде всего, необходимо отнести следующие:
1. Погрешность преобразования – отклонение измеренного значения от действительного. Она возникает из-за отклонения реальной функции преобразования от регламентиремой, определенной соответствующими ГОСТами. Этими же ГОСТами определены и допустимые отклонения реальных функций от требуемой зависимости.
2. Разрешающая способность – минимальный уровень входного воздействия, однозначно фиксируемый на уровне собственных шумов датчика. Характеризует наибольшую точность, с которой осуществляются измерения.
3. Чувствительность (масштабный коэффициент) – отношение изменения его выходного сигнала к вызвавшему его изменению входного сигнала.
Одним из важнейших параметров, относящихся к динамическим, относится время отклика и повторяемость.
Время отклика – время установления выходного сигнала в ответ на изменение входной величины. Характеризует инерционность датчика (не всегда время отклика должно быть меньше, чем продолжительность измерения).
Повторяемость – способность датчика воспроизводить результат измерения одной и той же входной величины с течением времени. Данная способность датчиков, прежде всего, связана с их конструктивной надежностью и старением материалов его элементов.
Кроме этого важной характеристикой при этом является переходная характеристика, представляющая собой зависимость выходного сигнала датчика при скачкообразном изменении измеряемой величины. Переходная характеристика характеризуется постоянной времени, степенью демпфирования, величиной выброса, кольцевой частотой.
Датчики характеризуются, как и любые технические средства такими параметрами как, например, отказоустойчивость, массогабаритными, экономическими показателями.
Датчики как любое электронное устройства характеризуются своим выходным сопротивлением – с этой точки зрения в измерительной цепи они могут играть роль источника напряжения или источника тока.
Включение датчика в измерительную цепь может осуществляться по-разному. В первую очередь способы включения определяются типом датчика. Например, термопара является по своей сути источником е.д.с. – напряжение снимается непосредственно с выводов датчика и определяется его градуировочной характеристикой.
Если датчик представляет собой резистор, сопротивление Rt которого меняется в зависимости от температуры, для снятия с него сигнала его включают в состав делителя (рис.8). Выходное напряжение с датчика определяется следующим образом
 .
.
Выбор соотношения величин резисторов R и Rt будет определять диапазон изменения напряжения U(Т) при изменении температуры от ее минимального до максимального значения. Однако при выборе значений R и Rt это не главное – любой диапазон U(Т) всегда можно привести к заданному с помощью масштабного усилителя.
С делителя, как с измерительной цепи, мы снимаем напряжение, т. е. для последующих цепей он должен играть роль источника напряжения. Для выполнения этих условий при выбранном соотношении величин резисторов R и Rt мы должны брать их номиналы как можно меньше. При этом ток через делитель будет относительно большим и при подключении к измерительной цепи конкретной нагрузки в нее будет ответвляться лишь незначительная его часть. Т. е. подключение нагрузки фактически не будет влиять на величину напряжения снимаемого с Rt и измерительная цепь действительно будет играть для нагрузки роль источника напряжения.
С другой стороны номиналы резисторов R и Rt в сумме определяют ток, текущий через терморезистор Rt. Большой ток, текущий через них может приводить к их саморазогреву и к появлению дополнительных погрешностей. Т. е. с этой точки зрения величины резисторов R и Rt должны выбираться как можно больше.
Конечно, при практическом выборе номиналов резисторов нельзя пользоваться определениями о том, что их нужно брать как можно больше или как можно меньше. «Больше», «меньше» – эти понятия относительные и как видно из выше сделанных рассуждений величины резисторов R и Rt должны выбираться, прежде всего, относительно значения величины используемой нагрузки.
Для того чтобы выбор величины резисторов R и Rt производился как можно проще все перечисленные требования на практике в конечном итоге сводятся к требованию обеспечения как можно большего сопротивления нагрузки (большого входного сопротивления последующего каскада).
Если в качестве сопротивления R использовать нелинейное сопротивление с соответствующей характеристикой можно проводить линеаризацию характеристики Rt и получать линейную зависимость U(T). При этом, очевидно, что, подбирая характеристику сопротивления R, мы можем добиться в нужной точке характеристики (например, для среднего значения температуры) минимальной погрешности нелинейности.
Напряжение с делителя можно представить как сумму напряжений – напряжения U(Tмин), соответствующего наименьшему значению диапазона измерения температуры Тмин, и напряжения D U(Tмин), соответствующего приращению температуры над Тмин . Так как Тмин известно, то текущую температуру лучше было бы оценивать лишь по значению D U(Tмин). Диапазон изменения этого приращения мал и его можно было бы оценивать с малыми относительными погрешностями с помощью малошкального измерителя. Для оценки величины приращения D U(Tмин) можно использовать дифференциальный метод измерений, вычитая из снимаемого с термоуправляемого делителя напряжения напряжение равное по величине U(Tмин). Фактически, схема измерения при этом будет представлять собой измерительный мост (рис. 8). Одно из плеч моста – термоуправляемый делитель, другое служит для формирования значения напряжения равного U(Tмин).
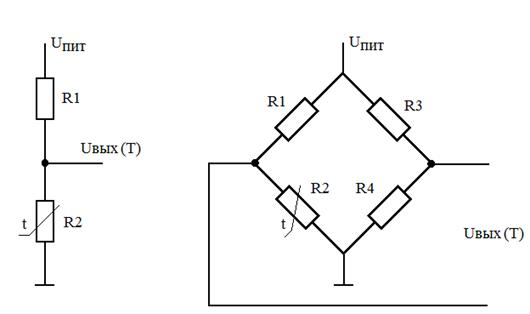
Мост балансируют при минимальной измеряемой температуре Тмин, подбирая величину сопротивления R3. При этом напряжение между точками 1 и 2 будет равно нулю. При изменении температуры, а, следовательно, величины сопротивления Rt балансировка моста будет нарушаться. Напряжение между точками 1 и 2 будет меняться пропорционально температуре:
Для исключения погрешностей, ток между точками 1 и 2 должен быть равен нулю, поэтому снятие напряжение с диагонали моста должно осуществляться цепями с высоким входным сопротивлением.
До последнего времени основную массу датчиков составляли устройства, формирующие аналоговый выходной сигнал – это, безусловно, соответствовало основной форме проектирования систем управления как аналоговых. С появлением и распространением цифровых систем начали получать распространение датчики, на выходе которых сигнал представляется в импульсной форме. Чаще всего это датчики, формирующие импульсную последовательность, частота которой меняется пропорционально изменению измеряемого параметра. Реже это датчики с широтно-импульсным представлением измеряемого параметра.
В основу принципов функционирования таких датчиков могут быть заложены самые различные физические явления – изменение частоты работы генератора при изменении температуры нагрева частотозадающих элементов, изменение частоты вибрации тела за счет изменения поведения вихревых потоков вокруг него при изменении скорости обтекающей его среды и т. д.
Применение таких датчиков в микропроцессорных измерительных системах может существенно упростить решение вопросов построения канала ввода измерительной информации в цифровое ядро системы. При этом часто удается или свести к минимуму аппаратные ресурсы, необходимые для получения оценки изменяемого параметра в виде двоичного кода, или в целом обойтись без них, если параметры импульсного сигнала с датчика (частота, длительность импульсов) могут оцениваться программно.

