 2015-06-04
2015-06-04 968
968Показанный на примере ППАЦП принцип построения многоотсчетных систем для коррекции динамических погрешностей и, сводящихся к ним по характеру проявления, статических погрешностей можно распространить и на другие многоотсчетные структуры АЦП. Кроме этого, комплексный подход к коррекции этих погрешностей можно распространить также на некоторые структуры, в которых в соответствие с принципом их работы деление разрядов выходного кода на группы как таковое отсутствует. Примером последних могут являться АЦП поразрядного кодирования.
Рассмотрим, как эти принципы могут быть реализованы для АЦП поразрядного кодирования. Кроме элементов, входящих в традиционную структуру АЦП поразрядного кодирования (компаратора КОМ, регистра последовательных приближений РПП и цифроаналогового преобразователя ЦАП), в структуру устройства добавляются сравнивающее устройство (СУ), блок опорного напряжения (БОН) и цифровой сумматор (СУМ) (рис. 8).
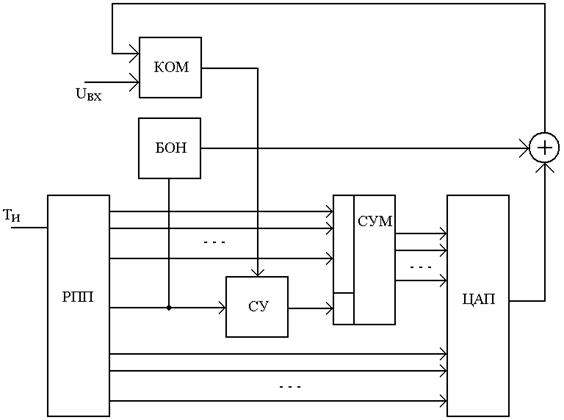
Р и с. 8. АЦП поразрядного кодирования с введением корректирующего рязряда
На первых тактах преобразования кодирование производится также как в обычном АЦП поразрядного кодирования. На некотором контрольном такте кодирование приостанавливается и производится суммирование уравновешивающего напряжения с выхода ЦАП с напряжением БОН. Величина напряжения БОН равна сумме весов еще не определенных разрядов (весу последнего определенного разряда). Если сумма уравновешивающего напряжения и напряжения БОН превысят входное напряжение, о чем можно судить по сигналу с компаратора, значит, весов последующих разрядов не хватит чтобы скомпенсировать входное напряжение и получить соответствующий ему код. При этом производится коррекция уже полученного кода старших разрядов путем прибавления к нему веса последнего определенного разряда. Инициализация проведения контроля осуществляется дополнительным разрядом РПП, а необходимость коррекции определяется выходным сигналом СУ. После окончания отработки контрольного такта работа АЦП продолжается в обычном порядке. Примечательной особенностью такой структуры является то, что в ней используется стандартная БИС РПП, однако, надо учитывать, что разрядность выходного кода в отличие от традиционной структуры в структуре с коррекцией динамической погрешности будет на один двоичный разряд меньше.
Группа старших разрядов, определяемых до контрольного такта, можно рассматривать как грубый канал многоотсчетной (грубо-точной) системы, а группу разрядов, определяемых позже контрольного такта, как точный канал. К точному каналу необходимо отнести и корректирующий разряд. Он по весу совпадает («перекрывается») с весом младшего разряда грубого канала. С этой точки зрения к рассмотрению и анализу этой структуры можно применять все общие принципы организации работы грубо-точных систем.
Исходя из того, что этот подход может использоваться для коррекции как динамических погрешностей второго рода так и статических погрешностей грубого канала, вес корректирующего разряда должен выбираться исходя из допустимых динамических погрешностей преобразователя в целом и статических погрешностей грубого канала, которые определяются в данном случае погрешностями задания весов старших разрядов ЦАП, соответствующих по весам разрядам выходного кода, определяемых до контрольного такта.
Отметим, что в общем случае может меняться не вес корректирующего разряда, а количество корректирующих разрядов, т. е. величина перекрытия грубого и точного канала.
Положение корректирующего разряда или количество перекрывающихся разрядов определяется исходя из априорной известности величины статических погрешностей грубого канала и динамических характеристик измеряемого сигнала. Но т. к. в процессе работы преобразователя могут меняться и статические погрешности грубого канала и динамические свойства входного сигнала, то для получения наибольшей точности преобразования и долговременной метрологической стабильности можно перестраивать работу устройства в ходе процесса измерения – изменять веса корректирующих (перекрывающихся) разрядов.
Структура двухотсчетного АЦП поразрядного кодирования с возможностью оптимальной компенсации динамических и статических погрешностей преобразования приведена на рис. 9. Преобразование грубого канала осуществляется цепью РПП1–ЦАП1–КОМ, преобразование точного канала – РПП2–ЦАП2–КОМ. С целью получения возможности коррекции кодов, получаемых в процессе преобразования входного напряжения грубым каналом, в точный канал вводятся дополнительный разряд, по весам перекрывающийся с весом младшего разряда грубого канала. Номер корректирующего разряда определяется кодом Ni. До тех пор, пока номер такта коррекции меньше номера такта преобразования, определяемого кодом счетчика СТ, преобразование осуществляется цепью РПП1–ЦАП1–КОМ, т. е. с помощью грубого канала, а затем – цепью РПП2–ЦАП2–КОМ, т. е. точным каналом. Выходной код NВЫХ устройства формируется суммированием кодов, получаемых в грубом и точном каналах. Определение необходимости коррекции и величины перекрытия осуществляется по значению корректирующего разряда за промежуток времени, позволяющий сделать представительную оценку.
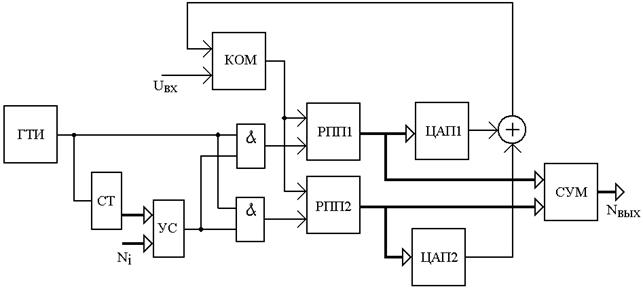
Р и с. 9. Приведение структуры АЦП поразрядного кодирования
к многоотсчетной структуре
Отметим еще одну возможность использования перекрытия разрядов в каналах преобразователя. Если в рассматриваемой структуре при контроле ЦАП1 выяснится, что один (несколько) из его разрядов, перекрывающийся с разрядами точного канала, вышел из строя, то его функцию будет выполнять разряд ЦАП2, того же веса. Это может привести к нескомпенсированности динамической погрешности, однако общая погрешность преобразования будет не больше, чем при игнорировании неработоспособности разряда ЦАП1. Конечно, для предусмотрения такой ситуации ЦАП2 должен иметь разрядную сетку, перекрывающуюся по весам со всеми разрядами ЦАП1. Фактически, с потерей некоторой доли точности таким образом осуществляется «саморемонт» преобразователя – повышается его живучесть.
На основании проведенного анализа, можно сделать вывод, что рассмотренные методы коррекции статических и динамических погрешностей (комплексная коррекция к собственному состоянию измерительного канала и к динамическим характеристикам измеряемого сигнала) применимы ко всем АЦП, структуру которых удается свести к многоотсчетной (грубо-точной) системе. К таким структурам относятся ППАЦП, следящие АЦП многоразрядных приращений, уравновешивающие АЦП поразрядного кодирования. К таким структурам нельзя отнести уравновешивающие АЦП последовательных приближений, следящие уравновешивающие АЦП.
Первую группу образуют АЦП, использующие алгоритмы кодирования, которые начинают определять выходной код со старших разрядов. Такие алгоритмы предполагают возможность появления динамических погрешностей второго рода. Но структуры этих АЦП можно свести к многоотсчетным, а за счет этого удается получить возможность корректировать и динамические погрешности второго рода преобразователей в целом, и статические погрешности их отдельных элементов.
Вторую группу образуют АЦП, использующие алгоритмы кодирования, которые начинают определять выходной код с младших разрядов. Такие алгоритмы свободны от появления динамических погрешностей второго рода. Но структуры этих АЦП невозможно свести к многоотсчетным. Коррекция статических погрешностей их отдельных элементов может проводиться лишь традиционными способами.








