 2015-06-05
2015-06-05 3003
3003Обеспечение требуемого уровня безопасности и регулярности полетов ВС ГА возможно только при условии, что экипаж ВС и задействованные наземные службы будут иметь достоверную информацию о местонахождении ВС в ВП в любой момент времени в течение всего полета. Определение местоположения ВС сводится к определению его координат теми или иными методами.
4.1. Системы координат
Местоположение ВС определяется его координатами в выбранной системе координат. Из множества систем координат обычно выбирается та, в которой легче и точнее решается конкретная навигационная задача.
В двумерной ортогональной прямолинейной (декартовой) системе координат ее оси Х и Y определяют плоскость. При решении навигационных задач она находит ограниченное применение как из-за ошибок, возникающих при замене сферических участков земной поверхности плоскими, так и из-за трудностей непосредственного измерения координат х и у ВС.
В двумерной полярной системе координат (ее центр называется полюсом) координатами точки являются расстояние от полюса до точки (радиус-вектор r) и угол  между условным начальным направлением (например, северным) и радиус-вектором
между условным начальным направлением (например, северным) и радиус-вектором  . Это также ортогональная система, так как координатные линии r = const (окружность) и = const (прямая) пересекаются под прямым углом. Координаты точки (цели) могут быть непосредственно измерены, например, двухкоодинатным радиолокатором (полагая, правда, что наклонная и горизонтальная дальности до цели отличаются мало).
. Это также ортогональная система, так как координатные линии r = const (окружность) и = const (прямая) пересекаются под прямым углом. Координаты точки (цели) могут быть непосредственно измерены, например, двухкоодинатным радиолокатором (полагая, правда, что наклонная и горизонтальная дальности до цели отличаются мало).
Трехмерная сферическая (полярная) система координат имеет центр, полярную ось и принятые в математике координаты (рис. 4.1):
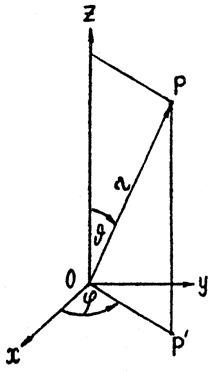
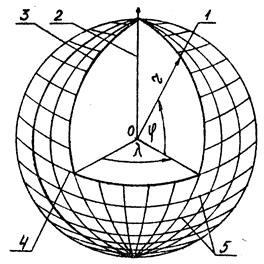
Рис. 4.1. Сферические координаты Рис. 4.2. Сферическая система
в математике координат в навигации:
1- радиус-вектор; 2 – полярная
ось; 3 – начальный меридиан;
4 – экватор; 5 – параллели.
r – длина радиус-вектора,  - долгота,
- долгота,  - полярное расстояние.
- полярное расстояние.
Координатная поверхность при r-const – сфера с центром в начале координат. В географии и в навигации принято начало координат совмещать с центром Земли, и приняты несколько иные отсчет и обозначения координат (рис. 4.2.): сферическая широта - угол между горизонтальной плоскостью и радиус-вектором из центра сферы на цель, сферическая долгота - угол между плоскостью начального вертикального большого круга и плоскостью вертикального большого круга, проходящего через цель. Система – криволинейная, ортогональная.
Географическая система координат подобна сферической. Разница в том, что сфера заменена эллипсоидом вращения, как наиболее близким по форме к телу Земли. При этом вертикальные большие круги заменяются эллипсами. Линии их пересечения с эллипсоидом (сферой) называются меридианами, начальный меридиан – Гринвичский. Линия пересечения горизонтального большого круга с эллипсоидом (сферой) – экватор, а линии пересечения других горизонтальных кругов с эллипсоидом (сферой) – параллели. Соответственно - географическая широта, -географическая долгота. От экватора к северному полюсу - широта положительная, к южному полюсу - широта отрицательная. На восток от Гринвича - долгота восточная (положительная), на запад от Гринвича - долгота западная (отрицательная).
В районах, близких к экватору, меридианы практически параллельны (их схождение мало) и вместе с параллелями могут на небольших участках экватора представлять систему координат, близкую к декартовой XY, удобной для расчетов и отображения информации. Этого нельзя сказать о районах, расположенных в высоких широтах.
На помощь приходит ортодромическая система координат. Ортодромией называется дуга большого круга (эллипса), соединяющая начальную и конечную точки маршрута ВС. В этой системе граница большого круга (эллипса), частью которой является ортодромия, называется условным экватором. Граница большого круга (эллипса), проходящего через начальный пункт маршрута перпендикулярно условному экватору, называется условным начальным меридианом. Таким образом, ортодромическая система координат подобна географической (сферической), повернутой так, что весь маршрут полета ВС оказывается в зоне, где можно применять условную систему координат XY с началом в начальном пункте маршрута, осью Y, совпадающей с ортодромной, и осью Х, совпадающей с условным начальным меридианом.
Сферическую систему координат удобно использовать, например, и при работе наземного трехкоординатного радиолокатора. В этом случае начало координат расположено в точке, где находится его антенна, полярная ось вертикальна; угловое положение цели в горизонтальной плоскости (азимут) отсчитывается от направления на север, угловое положение цели в вертикальной плоскости (угол места) отсчитывается от горизонтальной плоскости. Возможны и другие системы координат, используемые для решения навигационных задач, исходя из их специфики. Например, гелиоцентрическая система координат используется, главным образом, в космической аэронавигации. Параметры всех систем координат могут быть пересчитаны из одной в любую другую.
4.2. Линии и поверхности положения
Иногда определить (измерить) непосредственно координаты ВС (т.е. координатные линии или поверхности) в выбранной системе координат бывает затруднительно. Проще оказывается определить некоторый параметр, связанный с координатами определенными математическими действиями, и получить так называемую линию (или поверхность) положения. Линии и поверхности положения могут не совпадать с координатными, но могут позволить определить местоположение ВС в выбранной системе координат.
Определение: линия или поверхность положения – это геометрическое место точек на плоскости или в пространстве, для которого справедливо постоянство значения координаты в выбранной системе координат, либо величины, полученной на основе математических действий над этими координатами.
Пример: ВС, принимая радиосигналы, одновременно посланные из разнесенных центров О1 и О2 (рис. 4.3), не может определить расстояния до этих центров D1 и D2, но измерив временной интервал между принятыми сигналами, может определить разность этих расстояний D1 - D2. Это еще не точка местонахождения ВС, но одна из точек гиперболы, так как известно, что геометрическим местом точек, для которых D1 - D2 = const, является гипербола. Для разных значений const может быть построено семейство гипербол. Это линии положения, которые можно интерпретировать как преобразованные координатные. Очевидно, что для однозначного определения местонахождения ВС надо иметь еще один центр О3 посылки сигналов, расположенный на линии О1О3 (или О2О3), проведенной под некоторым углом к линии О1О2.Определив разность расстояний от центров О1 и О3, до ВС, по ней находим еще одну гиперболу D1 – D3 = const, на которой ВС также находится. Таким образом, искомая точка местоположения ВС определяется как точка пересечения двух гипербол.
Надо заметить, что одной из основных функций радиотехнических систем обеспечения полетов (наземных и бортовых) и является определение линии положения.
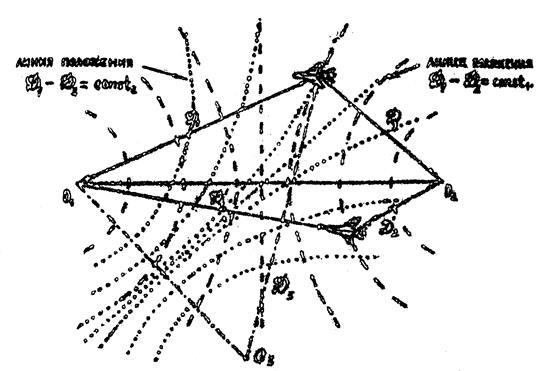
Рис. 4.3. Линии положения при разностно-дальномерном методе.
4.3. Некоторые характеристики сигналов, используемых в радиотехнических системах гражданской авиации
Существует много определений сигнала, отражающих (подчеркивающих) те или иные его свойства.
В радиотехнических системах сигнал – это некоторый колебательный процесс в электромагнитных цепях или полях, выполняющих функции носителя информации.
Используемые сигналы могут быть по длительности непрерывными или прерывистыми, с постоянной или переменной частотой, с неизменной (относительно опорного колебания) или с изменяемой (изменяющейся) фазой, с неизменным или с изменяемым уровнем.
Гармоническими называются колебания, в которых функция f (t) изменяется по закону f (t) =  , где w - некоторый коэффициент пропорциональности между временной и угловой мерами, а
, где w - некоторый коэффициент пропорциональности между временной и угловой мерами, а  - некоторая постоянная начальная фаза. Учитывая, что периоду T колебаний во времени соответствует период 2
- некоторая постоянная начальная фаза. Учитывая, что периоду T колебаний во времени соответствует период 2  изменения условий функции, текущее значение угла можно записать как
изменения условий функции, текущее значение угла можно записать как
 , (4.1)
, (4.1)
где  - коэффициент, называемый угловой частотой.
- коэффициент, называемый угловой частотой.
Графически гармонические колебания могут изображаться как функции от  , так и от
, так и от  .
.
Частота и период колебаний связаны с длиной волны соотношением
 , (4.2)
, (4.2)
где - длина волны, с – скорость света (с=3*108 м/с), T – временной период колебаний, f – частота колебаний.
Радиоволны классифицируются по диапазонам (табл. 2).
Таблица 2

