 2015-06-05
2015-06-05 4613
4613Одним из главных назначений наземных и бортовых радиотехнических средств ГА является обеспечение нормального проведения полета ВС на всех его этапах. Чтобы понять специфику радиотехнических устройств (систем) и их применение на каждом этапе, необходимо ознакомиться с этапами полета и основами организации воздушного пространства (ВП), с соответствующими понятиями и определениями.
3.1. Общие положения
Полетом ВС называется его движение в ВП с целью перемещения людей, груза или решения других поставленных задач из одной точки земной поверхности в другую.
Движение ВС состоит из поступательного движения центра масс ВС относительно земной поверхности и углового движения вокруг центра масс.
Траектория полета представляет собой совокупность последовательных положений центра масс ВС в пространстве.
Проекция центра масс на поверхность земли называется местом ВС.
Проекция траектории полета ВС на поверхность земли или, что то же, совокупность последовательных мест ВС называется линией пути.
При выполнении полетов ВС его траектория задается в пространственно-временных координатах. Описание такой траектории составляет навигационную задачу, решаемую наукой – навигацией. Сюда входит:
определение задач и программ движения ВС в пространстве и во времени, обеспечивающих наиболее безопасный и экономичный (по затратам и времени) полет с учетом метеорологических условий и их возможных изменений;
использование методов получения информации о пространственно-временном положении ВС и параметрах режима его полета;
применение технических средств для сбора, переработки и отображения информации о полете;
использование полученной информации для ориентировки и обеспечения управления полетом ВС по заданной программе.
В полете аэродинамические силы, сила тяги, вес и разного рода возмущающие силы приводятся к центру масс ВС. Стабилизация центра масс ВС относительно заданной траектории и ликвидация неплановых отклонений от нее является задачей пилотирования или управления полетом. Управление полетом, таким образом, сводится к созданию с помощью рулей и двигателей управляющих аэродинамических сил и моментов относительно центра масс ВС.
Навигация и пилотирование являются составной частью общего процесса- самолетовождения.
Под самолетовождением понимается комплекс действий экипажа ВС и работников наземных служб (прежде всего движения и эксплуатации радиотехнического оборудования и связи), направляемых на обеспечение наибольшей точности выполнения полета ВС по заданному маршруту и обеспечение посадки в аэропорту назначения в установленное время.
Осуществление полета по заданному маршруту требует выполнения большого количества четко разграниченных операций, в связи с чем выделяются отдельные этапы полета. Каждому их этих этапов свойственны один или несколько характерных режимов полетов, предусмотренных Руководством по летной эксплуатации ВС.
Режим полета представляет собой сочетание таких параметров полета, как скорость, высота, угол наклона траектории, угол крена, угол тангажа и др., оказывающих основное влияние на формирование траектории полета.
3.2. Этапы полета ВС
В зависимости от транспортной или функционально иной операции схемы вариантов полетов и их этапов могут несколько видоизменяться. Общими для них являются следующие этапы полета (рис. 3.1):
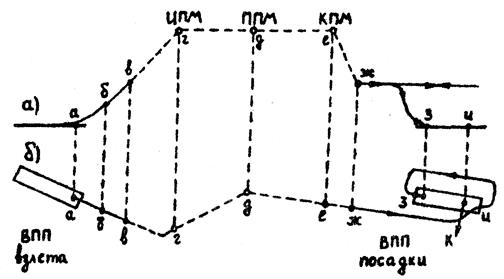
Рис. 3.1. Этапы полета ВС по заданной траектории.
а – профиль полета; б – линия заданного пути
взлет (участок аб);
начальный набор высоты (участок бв);
набор заданной высоты полета по маршуту (участок вг);
полет по маршруту (участок где);
снижение (участок е ж) с возможным ожиданием посадки в специально отведенной для этого зоне ВП;
заход на посадку (участок жз);
посадка (участок зи);
руление до остановки на стоянке (участок ик).
Взлет – это этап движения от момента исполнительного старта до набора высоты, соответствующей максимальной высоте препятствий на подходах к аэродрому, и приобретения безопасной скорости взлета.
Высота, называемая условной (Нусл), отсчитывается от уровня взлетно-посадочной полосы (ВПП) в точке отрыва ВС.
В процессе взлета ВС разгоняется, отрывается от ВПП и продолжает разгон с набором высоты Нусл ((10-15)м и безопасного значения скорости взлета, определяемой типом ВС. На этапе взлета с высоты 3-5 м начинается уборка шасси ВС, которая заканчивается на этапе начального набора высоты. После уборки шасси в точке этого этапа, соответствующей Нусл = 120 м, начинается уборка средств механизации крыла. Заканчивается участок начального набора высоты на высоте круга аэродрома Нк = 400-600 м. К этому моменту убираются средства механизации крыла, конфигурация ВС переходит от взлетной к полетной, и скорость полета достигает величины, на 25% превышающей скорость сваливания ВС в полетной конфигурации.
На этапе набора заданной высоты полета по маршруту осуществляется дальнейший разгон ВС до маршрутной скорости и вывод на заданный путевой угол.
В маршрутном полете ВС совершает движение на установленном эшелоне полета. Эшелон полета – это однаиз поверхностей постоянногоатмосферного давления, расположенных на регламентированных расстояниях друг от друга по высоте. Этот этап полета начинается в исходном пункте маршрута (ИПМ). При полете по маршруту возможны изменения в направлении полета, которые производятся в поворотных пунктах маршрута (ППМ). Завершается маршрутный полет в конечном пункте маршрута (КПМ).
На этапе снижения еж (рис. 3.1) ВС совершает полет с потерей высоты по наклонной прямой. Снижение ВС с высоты эшелона полета до высоты круга аэродрома (400-600 м) выполняется за строго определенное время, называемое предельным временем снижения. Выбор скорости снижения определяется из условия обеспечения комфорта пассажиров и стремления улучшить экономические показатели (уменьшить расход топлива уменьшением времени снижения). Этап снижения заканчивается в районе аэродрома, где ВС переходит в горизонтальный полет на высоте 400-600 м и приступает к выполнению захода на посадку.
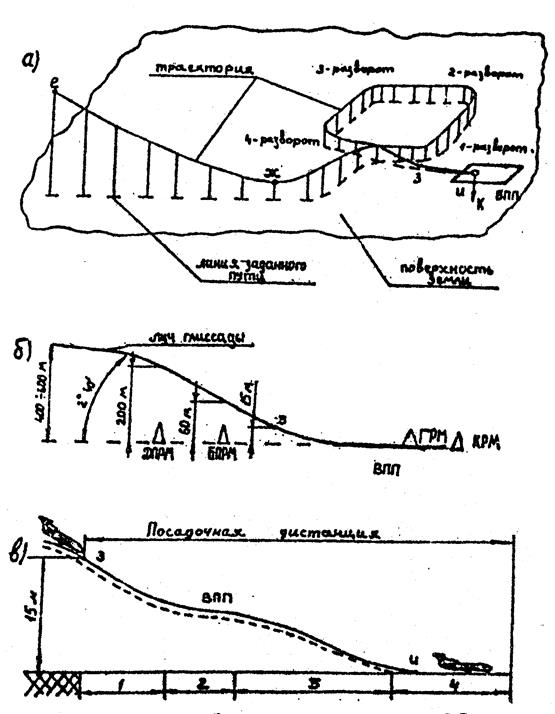
Рис.3.2. Этапы снижения и посадки ВС:
а – снижение; б – заход на посадку; в - посадка
Первым участком этапа захода на посадку жз является предпосадочный маневр по прямоугольному маршруту («коробочке»), в процессе которого ВС совершает четыре разворота. Иногда предусматривается возможность вписываться в траекторию прямоугольного маршрута с любого направления и выполнять перед посадкой только четвертый или третий и четвертый или второй, третий и четвертый развороты. Допустим также заход на посадку с прямой без выполнения посадочного маневра. Как правило, при полете по прямоугольному маршруту до третьего разворота выпускаются шасси, между третьим и четвертым разворотами закрылки устанавливаются на угол 15-30 градусов, а после четвертого разворота до начала движения по наклонной траектории закрылки выпускаются полностью. Второй участок этапа захода на посадку начинается с момента пересечения линии глиссады, образуемой радиомаяками глиссадным (ГРМ) и курсовым (КРМ) системы посадки (СП). К этому времени скорость ВС уменьшается до величины скорости предпосадочного снижения. В точке пересечения глиссады ВС переходит в режим снижения по наклонной прямой с углом наклона 2040I, равным углу наклона глиссады. При движении по глиссаде скорость ВС постоянна.
На высоте 15-20 м начинается заключительный (до руления) этап полета - посадка ВС (участок зи). Он состоит из четырех участков: выравнивания 1, выдерживания 2, парашютирования 3 и пробега 4. К концу участка выравнивания вертикальная скорость приземления ВС снижается до безопасной. На участке выдерживания ВС совершает горизонтальный полет на высоте 0,5-1 м с целью уменьшения горизонтальной скорости до допустимой величины. При парашютировании ВС двигается по криволинейной траектории до момента касания ВПП. После приземления начинается заключительный участок этапа посадки – пробег, завершающийся полной остановкой ВС с последующим рулением до остановки на стоянке (участок ик). Горизонтальное расстояние от порога ВПП до точки полной остановки ВС называется посадочной дистанцией. Следует отметить, что в зависимости от типа ВС и условий посадки участков выдерживания и парашютирования может и не быть.
Особым этапом полета является уход на второй круг. Он осуществляется в тех случаях, когда в силу различных причин (например, отсутствие визуальной видимости на высоте принятия решения о посадке, возникновение непредвиденных и превышающих допустимых отклонений от заданной траектории) становится невозможным совершить посадку ВС. На второй круг ВС может уходить на любом участке этапов захода на посадку и посадки, включая участок выравнивания. Основным ограничением при этом является высота принятия решения Нпр при уходе ВС на второй круг. Управление ВС при уходе на второй круг отличается от управления на этапе начального набора высоты только начальными условиями.
3.3. Основы организации воздушного пространства
ВП государства используется не только для полетов ГА, но и в интересах других ведомств, связанных с полетами военной авиации, с запусками космических объектов, с облетом газо- и трубопроводов, лесов, автомагистралей и т.п.
Для того, чтобы удовлетворить потребности всех пользователей ВП, установлена определенная структура ВП. Цель ее – создать благоприятные условия для каждого пользователя ВП при обеспечении высокого уровня безопасности полетов (БП), эффективности и своевременности выполнения ими своих задач.
Для этого в ВП выделяются два объема. В одном из них разрешаются полеты ВС, в другом – запрещается какая-либо деятельность, связанная с использованием ВП.
В пространстве, где разрешаются полеты, выделяются определенные элементы, показанные на рис.3.3, образующие структуру ВП для ГА.
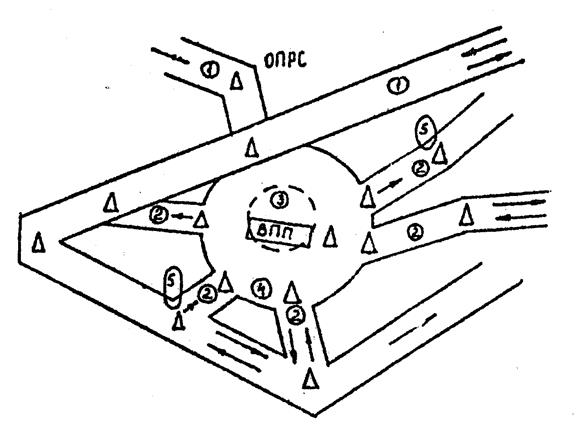
Рис. 3.3. Основные элементы структуры воздушного пространства:
1- воздушные трассы; 2 – коридоры района аэродрома; 3 - зона взлета и посадки (круга); 4 - границы района аэродрома; 5- зона ожидания; ОПРС – отдельная проводная радиостанция; ВПП – взлетно-посадочная полоса.
Для постоянных полетов между определенными городами (аэропортами) устанавливаются воздушные трассы, оборудованные необходимыми радиотехническими средствами для навигации и управления воздушным движением (УВД). В зависимости от тактико-технических характеристик (ТТХ) эксплуатируемых на каждой трассе ВС, воздушные трассы имеют определенную ширину (в пределах, как правило, 8-10 км) и диапазон высот, связанный с оптимальным диапазоном высот полета для эксплуатируемых ВС. Обычно стремятся к тому, чтобы два крупных аэропорта, имеющие между собой авиатранспортные связи, соединялись трассой, имеющей наименьшее расстояние и наименьшее количество участков, ее составляющих. Этого не всегда можно достигнуть либо из-за необходимости обеспечить безопасное разделение полетов по трассе от различных зон, используемых другими пользователями, либо из-за ограниченных возможностей устанавливать на земле средства навигации и УВД по линии кратчайшего расстояния. В таких случаях воздушная трасса представляет собой совокупность отдельных участков, примыкающих друг к другу под различными углами и имеет ломанный характер.
ВС на трассе, как правило, находятся в крейсерском полете, т.е. следуют в горизонтальном полете на оптимальной в каждом случае скорости.
По данным ИКАО в настоящее время на крейсерские полеты приходится около 75% летного времени.
ВП, где осуществляются остальные этапы полета, относится, в основном, к району аэродрома. Это ВП примыкает непосредственно к аэропорту, имеет размеры, как правило, в пределах 50-100 км от аэропорта в горизонтальном измерении и до 4500-6000 м в вертикальном. Эти размеры определяются, прежде всего, летно-техническими характеристиками эксплуатируемых на аэродроме ВС, направлением подхода воздушных трасс к аэродрому, схемами предпосадочного маневрирования, количеством и направлением ВВП, тактико-техническими характеристиками радиотехнических средств навигации и УВД, а также особенностями использования ВП вблизи аэродрома, связанными с базированием авиации различных ведомств, с физико-географическими (равнинная, холмистая, горная местность и т.п.), метеорологическими и другими особенностями.
Воздушный коридор - часть ВП, в котором ВС снижаются и набирают высоту.
При близком расположении нескольких аэродромов воздушное пространство над ними объединяется в район аэроузла.
В районе аэродрома (аэроузла) воздушные суда находятся на этапах взлета, набора высоты, снижения, захода на посадку и посадки. Исходя из особенностей самолетовождения на каждом их этих этапов в районе аэродрома (аэроузла) выделяются следующие структурные элементы:
а) коридоры набора высоты и снижения, где ВС набирает высоту (после выхода на заданный курс полета по маршруту) или снижается (для подхода на высоту, с которой начинается маневрирование для захода на посадку). Таким образом, указанные коридоры являются как бы переходной зоной от крейсерского полета по воздушной трассе к высоте маневрирования для захода на посадку («входной коридор» для аэродрома), либо от высоты «круга» (при взлете) до выхода на крейсерский эшелон («выходной» коридор).
В связи с этим входные и выходные коридоры, которые иногда могут и совпадать между собой, зачастую в плане совпадают с отдельными участками воздушных трасс;
б) зона взлета и посадки – воздушное пространство от уровня аэродрома до установленной высоты, обеспечивающей безопасность полета над аэродромом в зависимости от абсолютной высоты последнего, атмосферного давления, наличия естественных и искусственных препятствий вблизи аэродрома и т.п.
В зоне взлета и посадки организуются маршруты взлета и набора высоты круга, а также маршруты захода на посадку (рис. 3.2).
Размеры этой зоны определяются летно-техническими характеристиками эксплуатируемых на аэродроме ВС, оптимальными маршрутами набора высоты и захода на посадку для этих ВС, возможностями радиотехнических средств навигации и УВД и другими специфическими условиями.
Как правило, размеры зоны взлета и посадки в плане простираются на расстояние 25-30 км от аэропорта. Особенно следует выделить предпосадочную прямую. Это ВП ориентировано вдоль продолжения оси ВПП и имеет размеры, зависящие от посадочных характеристик ВС, установленной безопасной высоты полета в зоне взлета и посадки, характеристик радиотехнических и светотехнических средств посадки. Как правило, посадочная прямая удалена от торца ВПП на 15-20 км и ограничена высотой 400-600 м от уровня ВПП.
Экипаж ВС, выполняя полет на предпосадочной прямой, обязан выдерживать в допустимых пределах отклонения от глиссады по вертикали и по горизонтали.
Если по каким-либо причинам не произведена посадка с первого захода, то ВС уходит на второй круг, т.е. двигается по специальному стандартному маршруту в зоне взлета и посадки, называемому по этой причине иногда «зоной круга»;
в) зона ожидания - часть ВП района аэродрома, предназначенного для ожидания разрешения захода на посадку. Это может возникнуть в случае, когда темп прибытия ВС к аэродрому превышает возможности ВПП по осуществлению посадок ВС в отдельные интервалы времени, либо из-за неготовности ВПП к посадке в какой-либо кратковременный период.
3.4. Основные положения организации воздушного движения
Если бы в ВП осуществлялся полет одиночных ВС, маршруты которых не пересекались бы между собой, то очевидно, приведенных выше элементов структуры ВП было бы вполне достаточно для безопасности и эффективного выполнения полета. Рассчитанный или скорректированный экипажем в процессе подготовки и выполнения план полета выполнялся бы без каких-либо ограничений. Однако в действительности этого не происходит, так как в ВП одновременно находится большое количество ВС различных ведомств, выполняются другие работы с использованием ВП. Для того, чтобы обеспечить безопасность полетов в таких условиях, создана специальная система организации воздушного движения (ОрВД). Она представляет собой комплекс действий наземных служб (движения, эксплуатации радиотехнического оборудования и связи и др.) и экипажей ВС, направленных на обеспечение безопасности, регулярности и экономичности каждого полета в общей совокупности находящихся (или планируемых) в воздухе ВС при эффективном использовании ВП с учетом задач, решаемых различными его потребителями.
Первой фазой решения задач ОрВД является организация воздушного движения (ВД), исходя из потребностей и особенностей выполнения полетов, описанная выше.
Второй фазой ОрВД является планирование использования ВП и ВД, которое осуществляется на основе поданных заявок на использование пространства (в том числе и полеты) и недопущения перегрузок системы ОрВД. Особенность этой фазы заключается в том, что решаемые задачи не связаны с реальной воздушной обстановкой. Она как бы подготавливает благоприятные условия для осуществления управления ВД, являющегося третьей фазой ОрВД. УВД осуществляется с целью предупреждения столкновения ВС между собой в воздухе и на земной поверхности, а также для регулирования потока реально находящихся в воздухе ВС, для обеспечения решения задач, поставленных перед каждым полетом. В процессе УВД диспетчер службы движения постоянно контролирует движение всех ВС, находящихся под его управлением, дает необходимые команды и информацию экипажам ВС, поддерживая с ними радиосвязь по установленным правилам и фразеологии радиообмена.
На каждом этапе полета имеются свои особенности самолетовождения, их необходимо учитывать при организации УВД. Создаются различные органы УВД, которые решают свои задачи применительно к различным этапам полета. В табл. 1 представлены эти органы УВД и этапы полета, на которых они осуществляют УВД.
Таблица 1
| ОРГАНЫ УВД | ЭТАПЫ ПОЛЕТА |
| Диспетчерский пункт руления | Руление ВС по летному полю аэродрома_ |
| Диспетчерский пункт старта | Взлетно-посадочная полоса и последний участок предпосадочной прямой |
| Диспетчерский пункт круга | Взлет и заход на посадку |
| Диспетчерский пункт посадки | Посадка |
| Диспетчерский пункт подхода | Набор высоты и снижение с эшелона для захода на посадку |
| Районный центр | Крейсерский полет_ |
3.5.Полный цикл управления движением воздушного судна
ВС в полете непрерывно находится под управлением какого-либо диспетчерского пункта службы УВД. Во внеаэродромном ВП – это районные центры (РЦ); на местных воздушных линиях – местные диспетчерские пункты (МДП); в районе аэродромов при полетах ВС по коридорам, маршрутам набора высоты и снижения, а также в зонах ожидания – это диспетчерские пункты подхода (ДПП); в зоне взлета и посадки – это диспетчерский пункт системы посадки (ДПСП), включающие, как правило, диспетчеров круга и посадки, осуществляющих УВД по маршрутам захода на посадку и на посадочной прямой. ВПП и ближайшие подступы к ней находятся в ведении стартового диспетчерского пункта (СДП); движением ВС по аэродрому управляет диспетчерский пункт руления (ДПР). Планы вылетов из аэропортов с учетом складывающейся воздушной обстановки разрабатывают аэродромные диспетчерские пункты (АДП). Еще задолго до начала полета информация о нем поступает в систему УВД в виде плана полета. Примерно за 1-1,5 часа до вылета экипаж должен явиться к диспетчеру АДП для согласования условий полета, доложить о готовности выполнять полет и получить диспетчерское разрешение на вылет.
Полный цикл УВД ВС показан на рис. 3.4.
В соответствии с запланированным временем вылета экипаж получает от диспетчера руления разрешение на начало движения и условия руления от места стоянки к предварительному старту, расположенному на удалении 50-100 м от ВПП. Диспетчер старта дает разрешение на занятие исполнительного старта и на взлет. После взлета и набора высоты 200 м ВС переходит под управление диспетчера круга, который сообщает экипажу условия входа ВС на траекторию набора высоты. После пролета границы зоны взлета и посадки управление движением осуществляет диспетчер подхода (диспетчер ДПП).
Однако еще до приема ВС на управление этот диспетчер имеет информацию о нем от диспетчера АДП. При установлении радиосвязи с экипажем взлетевшего ВС диспетчер подхода передает ему условия выхода из района аэродрома.
На протяжении всего времени нахождения ВС под управлением диспетчера подхода он обеспечивает безопасность движения регулированием интервалом между всеми ВС, а также предотвращением отклонений от установленных маршрутов. Кроме того, диспетчер подхода согласовывает условия выхода ВС с диспетчером РЦ. После пролета границы аэродрома экипаж переходит под управление к диспетчеру РЦ, который знает фактические данные о движении этого ВС от диспетчера подхода. При сообщении экипажа о входе в район УВД диспетчер РЦ уточняет его место, как правило, с помощью наземного радиолокатора и передает на борт условия полета по трассе. В процессе УВД диспетчер РЦ должен постоянно знать местонахождение каждого ВС и в любой момент времени передать нужную команду. Диспетчер РЦ при полетах по правилам полетов по приборам (ППП) обязан обеспечивать выдерживание экипажами интервалов эшелонирования, а также не допускать отклонений от установленных воздушных трасс.
При появлении тенденции к сокращению интервалов между ВС менее допустимых диспетчер УВД должен принять меры по предупреждению сближения.
После получения от экипажа сообщения о расчетном времени выхода из района УВД диспетчер РЦ уточняет его и не позднее чем за 10-15 минут до выхода ВС из района УВД согласовывает с диспетчером смежного РЦ время и эшелон выхода ВС в смежный район УВД. Такой процесс повторяется на
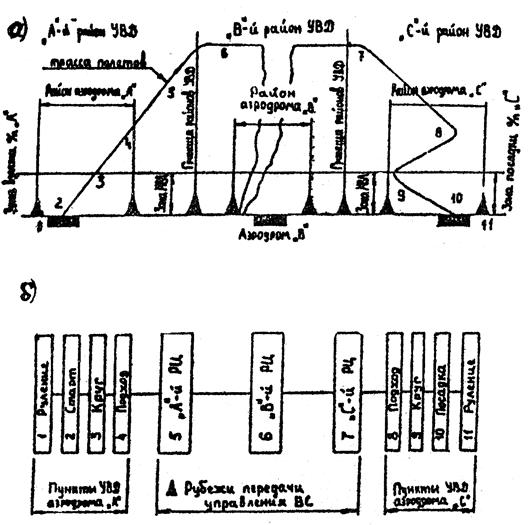
Рис. 3.4. Схема УВД ВС от взлета до посадки в различных зонах УВД (а), диспетчерскими пунктами (б)
границах между всеми смежными районами УВД, через которые ВС выполняет транзитный полет. При этом диспетчер РЦ и экипаж обязательно устанавливают радиосвязь при пролете границ районов УВД, пунктов обязательных донесений и достижении заданных эшелонов, а также во всех случаях по требованию экипажа или диспетчера. После входа ВС в район УВД, в котором расположен аэродром посадки, экипаж под руководством командира за 5-10 минут до начала снижения производит предпосадочную подготовку. В нее входят:
получение информации о метеорологической обстановке на основном и запасных аэродромах;
расчет остатка топлива, посадочного веса и центровки, рубежей начала снижения и безопасной высоты, элементов захода на посадку и др.
Разрешение на начало снижения экипаж получает от диспетчера РЦ, который исходя из сложившейся воздушной и метеорологической обстановки и по согласованию с диспетчером подхода назначает экипажу условия входа ВС в район аэродрома. После пролета границы района аэродрома ВС переходит под управление диспетчера подхода, который при докладе экипажа о входе ВС в район аэродрома обязан опознать его с помощью наземных радиотехнических средств и передать на борт информацию, необходимую для выполнения маневра захода на посадку (магнитный курс посадки, условия снижения и подхода к аэродрому, направление в зону ожидания и т.п.). Постоянно контролируя движение ВС, диспетчер подхода согласовывает с диспетчером круга условия входа ВС в зону взлета и посадки. При достижении ВС установленного рубежа диспетчер подхода дает указание экипажу о переходе на связь с диспетчером круга. После перехода под управление диспетчера круга экипаж получает от него условия захода на посадку. Диспетчер круга обязан непрерывно контролировать с помощью наземных технических средств соответствие маршрута захода на посадку по установленной схеме и при отклонении от схемы информировать об этом экипаж. Одной из основных задач диспетчера круга является контроль за сохранением безопасных интервалов между ВС и принятие мер по предупреждению опасных сближений. Кроме того, диспетчер круга согласовывает с диспетчером посадки темп и место подхода ВС к посадочной прямой и дает экипажу указание о переходе на связь с диспетчером посадки. Диспетчер посадки после выхода на связь с ним экипажа определяет положение ВС относительно установленной схемы захода на посадку, информирует экипаж об удалении ВС от начала ВПП. В процессе полета ВС по предпосадочной прямой диспетчер посадки постоянно контролирует положение его относительно глиссады по вертикали и горизонтали, а при наличии отклонения дает указания для выхода ВС на заданную траекторию или сообщает экипажу величину этих отклонений для принятия решения о продолжении захода на посадку или уход на второй круг. После пролета ближнего приводного радиомаяка (БПРМ) с момента визуального обнаружения ВС управляет движением диспетчер СДП. Диспетчер СДП до визуального обнаружения ВС постоянно прослушивает радиообмен экипажа с диспетчером посадки, убеждается, что ВПП свободна и после выхода ВС на визуальный полет разрешает посадку, продолжая контролировать его положение относительно оси ВПП. После посадки диспетчер СДП наблюдает за пробегом ВС по ВПП и дает указание о порядке ухода с нее. Освободив ВПП, ВС переходит под управление к диспетчеру руления, от которого экипаж получает информацию о порядке руления к месту стоянки.
3.6. Назначение и методы контроля воздушного движения
Контроль ВД является неотъемлемой составной частью технологии работы диспетчеров каждого пункта УВД. Необходимость контроля обусловлена неизбежными отклонениями каждого ВС от заданной диспетчером бесконфликтной пространственно-временной траектории, учитывающей складывающуюся (развивающуюся) воздушную обстановку в секторе (районе, зоне) управления и обеспечивающую безопасность (соблюдение установленных норм эшелонирования) и экономичность полета. Эти отклонения являются следствием многих заранее непредвиденных причин, носящих, как правило, случайный характер. Главные из них заключаются в изменениях условий воздушного движения, особенно поля ветра, и в недостаточной точности самолетовождения.
Основными элементами контроля воздушного движения являются:
постоянное наблюдение за фактическим выдерживанием каждым ВС заданной пространственно-временной траектории движения каждого ВС;
сопоставление фактических траекторий движения с запланированным (заданным) с целью выявления отклонений от них;
оценка обнаруженных отклонений с точки зрения безопасности (нарушение или тенденция к нарушению норм эшелонирования, отклонение за пределы установленной ширины коридора и т.п.) и экономичности (следование на экономически невыгодных эшелонах и режиме) полета.
В результате контроля диспетчер (или вычислительное устройство) должен получить данные, необходимые для дальнейшего анализа воздушной обстановки с целью принятия решения по регулированию движения каждого ВС и всего ВД в целом и передачи его в виде команд (указаний, информации) экипажу и соответствующим органам УВД (смежному диспетчерскому пункту, ведомственным пунктам управления).
Отсутствие данных о фактическом состоянии ВД в секторе (районе, зоне) управления и траекториях каждого ВС создает условия для возникновения опасных ситуаций, для избежания которых приходится либо применять завышенные нормы продольного эшелонирования, либо задерживать ВС в воздухе (либо на земле). Это приводит к снижению эффективности использования ВП (т.е. снижению его пропускной способности), экономичности и регулярности полетов.
Контроль за ВД должен удовлетворять следующим основным требованиям.
Оперативность, т.е. время, затрачиваемое на выявление и отображение информации о фактической траектории (местоположении) и скорости ВС, должно быть, по возможности, достаточно малым с тем, чтобы получаемая в результате контроля «картина» воздушной обстановки как можно меньше «устаревала». Оперативность контроля тесно связана с частотой получения (обновления) информации о каждом ВС, которая должна быть такой, чтобы в промежутке времени между двумя последовательными моментами времени его поступления не могли возникнуть новые существенные изменения воздушной обстановки. Требования к оперативности контроля неизбежно возрастают с увеличением интенсивности полетов и скоростей (горизонтальных и вертикальных) ВС.
Объективность, т.е. получаемая информация должна быть максимально независимой от субъективных ошибок диспетчеров, экипажей ВС и других лиц, участвующих в процессе сбора и обработки информации.
Точность, т.е. используемые методы и средства измерения (получения), передачи и отображения информации на рабочих местах диспетчеров должны обеспечивать достаточно высокую точность измеряемых величин.
Информативность, т.е. используемая информация должна иметь достаточно полные сведения о каждом ВС и общей воздушной обстановке, позволяющей принимать обоснованные решения по каждому эпизоду ВД.
Полнота, т.е. используемая информация должна гарантировать от пропуска (исключения) хотя бы одного ВС, находящегося под управлением. Кроме того, требование полноты включает необходимость отражения информации о метеорологической и режимной обстановках, без чего нельзя принимать правильных решений по регулированию ВД.
Надежность, т.е. контроль должен иметь высокую степень надежности в различных условиях выполнения полета и работы диспетчеров, быть устойчивым по отношению к каким-либо помехам.
Наглядность, которая заключается в том, что результаты контроля должны представляться (отображаться) в форме, приемлемой для дальнейшего использования диспетчером, независимо от того, будет ли дальнейшая обработка информации «ручной» или автоматизированной. Для контроля за ВД в целом необходимо, прежде всего, обеспечить контроль за полетом каждого ВС, т.е. иметь возможность определять фактические элементы его движения.
В принципе существуют три различных метода получения на пункте УВД информации о положении ВС в данный момент времени:
метод передачи данных о координатах, навигационных параметрах (курс, высота, скорость) и плане полета экипажем ВС или специальным устройством на борту;
метод определения координат ВС и необходимых параметров полета с помощью наземных радиотехнических средств или специальных вычислителей (радиотехнических средств), работающих автономно или совместно с бортовыми средствами;
метод сличения пути ВС по известным или предполагаемым навигационным элементам является фактическим дополнением к первым двум, т.к. самостоятельное применение может находить лишь в промежутках между поступлениями информации о фактической траектории движения, получаемой по указанным выше двум методам.
Метод контроля по докладам экипажа применяется со времени внедрения авиационной воздушной связи и в настоящее время является обязательным в каждом полете.
В простейшем случае он заключается в периодических радиодонесениях экипажа в соответствии с установленными правилами. На пункте УВД полученные данные фиксируются и используются в дальнейшем для анализа воздушной обстановки и принятия решения.
Положительным при данном методе является его сравнительная простота и дешевизна, достаточная полнота получаемой информации и высокая надежность при ее передаче. Точность метода может быть различной, так как она целиком зависит от возможностей технических средств навигации, квалификации экипажа. На точность оказывает также влияние скорость полета и интенсивность ВД, так как при необходимости передачи информации и высокой интенсивности ВД канал связи «борт-земля» может быть загружен, и за возможное время ожидания и передачи информации ВС может пройти значительное расстояние и изменить параметры своего полета.
Большим недостатком данного метода является также его недостаточная оперативность, малая частота передачи информации и подверженность субъективным ошибкам экипажа при составлении и передаче данных о полете.
Требуемая полнота информации по всем ВС, находящимся на управлении диспетчера, на основе этого метода очень затруднительна, так как требует большого объема радиообмена и страдает органическим недостатком – неодновременностью поступления данных от разных ВС, что очень усложняет общую оценку воздушной обстановки.
Наглядное представление получаемой от экипажа информации также усложнено, требует специальных приспособлений (планшетов, табло, графиков и т.п.) и дополнительного времени на ее нанесение и осмысление.
Метод контроля с помощью радиотехнических средств получил распространение в начале второго этапа развития системы УВД, когда стали широко использоваться наземные радионавигационные и радиолокационные средства. К основным из этих средств относятся:
а) наземные радиолокационные станции (обзорные, посадочные, обзора летного поля);
б) автоматические радиопеленгаторы;
в) системы ближней навигации.
Перечисленные радиотехнические средства обладают различными свойствами и возможностями при контроле ВД, но имеют и общие черты, основными из которых являются:
а) высокая оперативность получения информации о фактических параметрах движения ВС;
б) достаточно высокая степень объективности данных;
в) высокая точность информации и независимость ее от использования канала радиосвязи «диспетчер-экипаж» («борт-земля»);
г) надежность наземных средств контроля, как правило, выше чем бортовых;
д) полнота информации о состоянии ВД в определенный момент времени обеспечивается значительно проще;
е) обеспечивается возможность наглядного представления информации о местонахождении каждого ВС и всей воздушной обстановки в целом;
К существенным недостаткам метода относятся ограничения по дальности и высоте действия радиотехнических средств, необходимость более сложных и дорогостоящих устройств для решения задачи контроля.
Использование глобальных систем навигации и связи с применением ИСЗ в значительной мере снимает эти недостатки, но такие системы очень дороги и поэтому, а также по некоторым другим основаниям, они в ГА РФ пока находят очень ограниченное распространение (в основном, только в тех районах, где по природным условиям трудно организовать необходимое традиционное наземное радиотехническое обеспечение полетов). В настоящем пособии ознакомление с работой таких систем не предполагается.
Описанные выше методы, как правило, дают представление о положении ВС в заданный (или близкий к нему) момент времени и не позволяют представить воздушную обстановку и ее развитие в секторе (районе, зоне) управления на определенное время вперед. Поэтому каждый из этих методов нуждается в дополнении методом, который бы на основе информации о фактическом местоположении и скоростях движения ВС, получаемой от экипажей с помощью радиотехнических средств, давал бы расчетные данные о взаимном положении всех ВС на любые моменты времени.
Таким и является метод сличения пути (траекторий). Он основан на предположении, что в ближайшие будущие отрезки времени характер движения каждого ВС сохранится. Грамотное применение этого метода позволяет приводить местонахождения всех ВС к одним и тем же будущим моментам времени и, таким образом, решать вопросы контроля ВД и безопасности полета каждого ВС.

