 2015-06-28
2015-06-28 947
947Побудова автомата Мілі виконується на підставі запізнення реакції автомата Мура у порівнянні з автоматом Мілі.
Нехай заданий автомат Мура АA = (SA, XA, YA, dA, lA, {s0A}), еквівалентний йому автомат Мілі АB = (SB, XB, YB, dB, lB, {s0B}) будується в такий спосіб:
SB : = SA,
XB : = XA,
YB : = YA,
dB : = dA,
s 0B: = s 0A.
lB будується в такий спосіб, якщо в автоматі Мура d(sі,, xj) = sh і lA(sh) = ym, то в автоматі Мілі lB(s і, xj) = ym.
При графічному способі завдання автоматів при переході від вихідного автомата Мура до еквівалентного автомата Мілі вихідний сигнал ym, записаний поруч з вершиною sh, переноситься на всі дуги, що входять у цю вершину.
При табличному способі завдання автоматів таблиця виходів еквівалентного автомата Мілі виходить з таблиці переходів вихідного автомата Мура заміною символу sh, що стоіть на перетинанні рядка xj і стовпця si, символом вихідного сигналу ym, що відрізняє стовпець sh у таблиці переходів автомата Мура.
Приклад. Вихідний автомат Мура (рис.19.2 ліворуч) і еквівалентний йому автомат Мілі (рис. 19.2 праворуч). Виконано перенос вихідних сигналів з вершин на вхідні в них дуги.
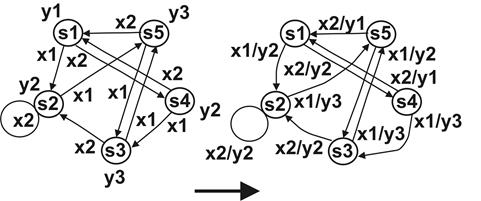
Рис. 19.2. Автомат Мура й еквівалентний йому автомат Мілі








