 2015-06-28
2015-06-28 273
273Стан si автомата А називається стійким, якщо зі стану d(sh, xj) = si при будь-яких xj випливає співвідношення d(si, xj) = si. Це означає, що якщо А перейшов у деЯкій стан під дією вхідного сигналу xj, то вийти з цього стану він може тільки при надходженні на його вхід іншого, відмінного від xj сигналу.
Автомат Мура називається асинхронним, якщо кожен його стан
si Î S – стійкий. У противному випадку А – синхронний.
Приклад: Асинхронний автомат Мура.
Таблиця 19.1
| S X Y | s1 y1 | s2 y3 | s3 y2 |
| x1 | s2 | s2 | s2 |
| x2 | s3 | s2 | s3 |
| x3 | s1 | s1 | s3 |
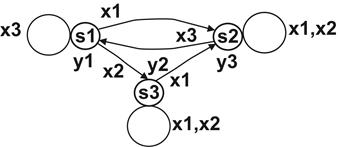
Рис. 19.1. Асинхронний автомат Мура
Визначення. Два автомати з однаковими вхідними алфавітами називаються еквівалентними, якщо після установки їх у початкові стани реакції автоматів на будь-яке вхідне слово збігаються.
Вихідний сигнал Y називається стійким у стані sh, якщо зі відношення l(si, xj) = ye і d(si, xj) = sh випливає, що l(sh, xj) = ye при всіх si і xj, для яких справедливі дві перших рівності.
Автомат Мілі називається асинхронним, якщо всі його стани і вихідні сигнали стійкі, у протилежному випадку він є синхронним.








