 2015-06-24
2015-06-24 780
780Для удобства выполнения расчетовсиловых факторов, действующих в кривошипно-шатунном механизме, индикаторная диаграмма из координат
рг = f(V) или рг = φ(S) перестраивается в координаты ∆pг = φ(α).
Перестроение индикаторной диаграммы производится графоаналитическим методом. Для этого используются данные из теплового расчета (таблица 2.15) по перемещению поршня АХ в пределах его хода от верхней мертвой точки до нижней мертвой точки (например, в диапазоне α = 360…5400) с шагом 100. В соответствии с рисунком 4.2 под индикаторной диаграммой строится вспомогательная шкала α в диапазоне 0…7200.
Из точек делений шкалы проводятся вертикальные линии до пересечения с линиями индикаторной диаграммы.
Справа от индикаторной диаграммы проводятся оси координат, где по оси ординат откладываются сила ∆Pг, а по оси абсцисс – угол α.
Сила давления газов ΔРг в Н в общем случае определяется по формуле
 |
(4.1)
где рг – индикаторное давление газов (давление над поршнем) при заданном угле поворота кривошипа, МПа;
р0 – давление в картере двигателя (под поршнем), МПа; принимается равным атмосферному – р0 = 0,1 МПа;
FП – площадь поршня, м2; определяется из выражения
FП = π D2/4. (4.2)
Поскольку силу на поршень создает избыточное давление газов, отсчет ординат на индикаторной диаграмме при перестроении следует производить от атмосферного давления. Развернутая индикаторная диаграмма в соответствующем масштабе является графиком изменения сил давления газов ∆Pг = φ(α). Масштаб этих сил μ в Н/мм определяется по формуле
μ = 106 μр FП, (4.3)
где μр – масштаб давления в МПа/мм, принятый при построении индикаторной диаграммы.
Определение силы давления газов таким образом сводится к умножению ординат графика ∆Pг = φ(α) на масштаб сил μ. Результаты расчета ∆Pг сводятся в таблицу 4.1.
Таблица 4.1 – Результаты вычисления сил, действующих в кривошипно-шатунном механизме
| α, град | ΔРг | Рj | P | Sш | N | K | T | Rш.ш | ||||||||
| мм | Н | мм | Н | мм | Н | мм | Н | мм | Н | мм | Н | мм | Н | мм | Н | |
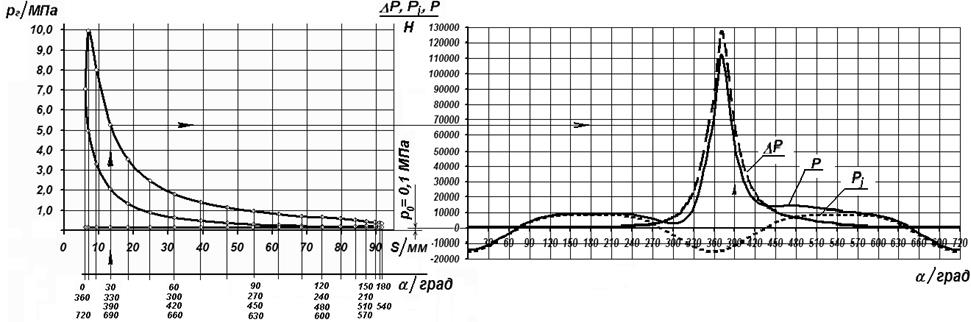 |
Рисунок 4.2 – Перестроение индикаторной диаграммы и графики зависимостей сил давления газов DРг, инерции возвратно-поступательно движущихся масс Рj и суммарной Р от α
Для определения сил инерции возвратно-поступательно движущихся масс необходимо определить массу mj в кг частей кривошипно-шатунного механизма, совершающих возвратно-поступательное движение:
mj = mп + mш.п, (4.4)
где mп – масса поршневого комплекта (поршень, палец, поршневые кольца, детали стопорения пальца), кг;
mш.п – часть массы шатуна в сборе, отнесенная к поступательно движущимся массам, кг.
Для большинства существующих конструкций автомобильных двигателей
mш.п = (0,25…0,30) mш, (4.5)
где mш – масса шатуна в сборе, кг.
Массы mп и mш рассчитываются по чертежам деталей или выбираются по статистическим данным по следующим зависимостям
mп = mп′ FП, (4.6)
mш = mш′ FП, (4.7)
где mп′ и mш′ - удельные массы соответственно поршня и шатуна, значения которых приведены в таблице 4.2.
Таблица 4.2 – Удельная масса в кг/м2 элементов КШМ
| Элемент КШМ | Карбюраторные двигатели при диаметре поршня, мм | Дизельные двигатели при диаметре поршня, мм | ||
| 60…80 | 80…120 | 80…100 | 100…140 | |
| Поршень: - алюминиевый сплав - чугун | 80…120 150…200 | 100…150 180…250 | 150…220 250…320 | 200…300 300…400 |
| Шатун | 100…150 | 130…200 | 250…320 | 300…400 |
Сила инерции возвратно-поступательно движущихся масс Рj в Н определяется по формуле
Рj = - mj R ω2 (cosα + λ cos2α), (4.8)
где R – радиус кривошипа в м; определяется по формуле
R = 0,5 S; (4.8)
ω – угловая скорость коленчатого вала в рад/c; определяется по формуле
 (4.9)
(4.9)
Значения (cosα + λ cos2α) для различных α и λ приведены в приложении Б. Расчеты Рj проводятся для тех же значений α, для которых определялась ∆Pг. Результаты расчета сводятся в таблицу 4.1.
Суммарная сила Р в Н, действующая на поршневой палец, определяется алгебраическим сложением сил давления газов ∆Pг и сил инерции возвратно-поступательно движущихся масс Рj по формуле
Р = ∆Pг + Рj. (4.10)
Результаты расчетов сводятся в таблицу 4.1.
От действия суммарной силы Р возникают следующие силы:
- суммарная нормальная (боковая) сила N в Н, направленная перпендикулярно оси цилиндра; определяется по формуле
N = Р tgβ; (4.11)
- суммарная сила, действующая вдоль шатуна Sш в Н, определяется по формуле
 (4.12)
(4.12)
где β – угол отклонения оси шатуна от оси цилиндра.
Причем 
От действия суммарной силы, действующей вдоль шатуна Sш, возникают следующие силы:
- суммарная радиальная сила К в Н, направленная по радиусу кривошипа; определяется по формуле
 (4.13)
(4.13)
- суммарная тангенциальная сила Т в Н, направленная перпендикулярно к радиусу кривошипа; определяется по формуле
 (4.14)
(4.14)
Причем 
Значения тригонометрических функций для различных α и λ приведены в приложении Б. Результаты расчета сил N, Sш, K, T сводятся в таблицу 4.1.
Центробежная сила инерции вращающейся части шатуна Кr.ш в Н, направленная по радиусу кривошипа и нагружающая шатунную шейку (шатунный подшипник)
Кr.ш = - mш.к R ω2. (4.15)
где mш.к – часть массы шатуна, отнесённая к вращающимся массам, кг, определяется по формуле
mш.к= mш – mш.п. (4.16)
Поскольку результирующая сила Rш.ш, действующая на шатунную шейку представляет собой геометрическую сумму
 |
(4.17)
то абсолютное значение этой силы в Н определится по формуле
 |
(4.18)
Результаты вычисления силы Rш.ш сводятся в таблицу4.1.








