2015-07-14
2015-07-14 2499
2499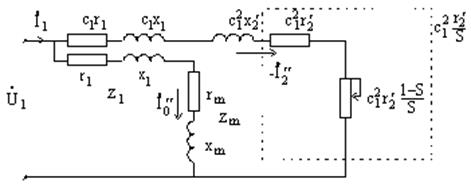
В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать.
В Г-образной схеме замещения
 ,
,
где  - комплексное число
- комплексное число
Ток I1, не должен изменяться, тогда исходя из Т-образной схемы
а, в Г-образной схеме ток
после преобразования получим
 ,
,
поэтому параметры статорной обмотки должны умножить на коэффициент С1, а параметры роторной обмотки на  (см. Г-образную схему). Покажем связь между током в роторе
(см. Г-образную схему). Покажем связь между током в роторе  (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током  (Г-образной схемы замещения).
(Г-образной схемы замещения).
Из Т-образной схемы ток
 ,
,
если подставить выражение тока  и преобразуем это выражение, тогда получим
и преобразуем это выражение, тогда получим
 ,
,
тогда отношение токов

равно комплексному коэффициенту С1.
т.е. С1 представляет собою отношение напряжения приложенного к двигателю  к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
Реально в машинах r1 и x1 << rm и Xm. Если пренебречь сопротивлением r1 и rm, тогда коэффициент С1 примет вещественную величину
 ,
, 
Г-образная схема замещения широко используется для построения круговой диаграммы асинхронной машины, а также вывода формулы электромагнитного момента.
 2.10 Вращающий (электромагнитный) момент асинхронной машины
2.10 Вращающий (электромагнитный) момент асинхронной машины
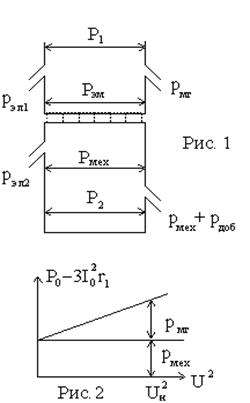
Для вывода формулы этого момента предварительно рассмотрим энергетическую диаграмму асинхронного двигателя (рис.1).
1. Активная потребляемая мощность из сети

2. В статоре имеются потери в обмотках

и магнитные потери Рмг, которые определяются из опыта холостого хода (см. рис.2).
3. Рэм – электромагнитная мощность
 ,
,
она электромагнитным путем передается на ротор. В роторе потерями в стали пренебрегаем, т.к. f = (2 - 3)Гц.
4. Потери в обмотке ротора Рэл2 определим ниже. pмех – механические потери определяем из рис.2. Рдоб – добавочные потери принимаются равными 0,5% от Р1. Рмех - полная механическая мощность.

Мощность на валу

КПД - 
М - электромагнитный момент, создаваемый в результате взаимодействия вращающего магнитного поля с током в роторе (предварительное определение). Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0.
Выразим электромагнитную и полную механическую мощность через электромагнитный момент.
Pэм = M×w1,
где w1 - угловая скорость поля статора.
Pмех = M×w,
где w - угловая скорость ротора.
Потери в обмотке ротора

итак  .
.
Потери в меди (алюминии) обмотки ротора зависят от электромагнитной мощности и скольжения и прямо от параметров не зависят. Для уменьшения этих потерь номинальное скольжение должно быть как можно меньше.
Исходя из этого выражения, получим формулу электромагнитного момента
 , откуда
, откуда  (1).
(1).
Используя Г-образную схему замещения получим
 (2)
(2)
Подставив уравнение (2) в уравнение (1) получим
если  , тогда
, тогда
 . Зависимость M = f(S)
. Зависимость M = f(S)
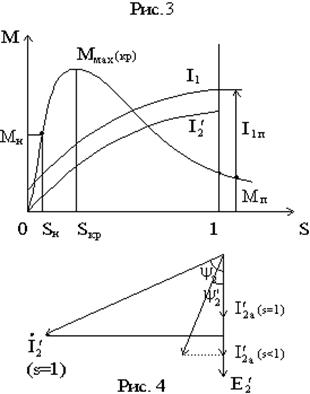 Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от U2 квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%. При постоянных параметрах схемы замещения зависимость М электромагнитного момента от скольжения представлена на рис.3.
Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от U2 квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%. При постоянных параметрах схемы замещения зависимость М электромагнитного момента от скольжения представлена на рис.3.
Пояснение зависимости M = f(S).
Область от S = 0 ¸ Sкр
При малом скольжении X2S» 0, тогда ток в роторе  активному току, с увеличением S
активному току, с увеличением S 
 M
M
Момент зависит от потока и активной составляющей тока в роторе

В области Mmax начинает проявляться индуктивное сопротивление X2S.
Область скольжений S = Sкр ¸ 1
В этой области с увеличением скольжения S увеличивается индуктивное сопротивление ротора X2S = X2×S за счет которого увеличивается угол y2 между ЭДС  и током (см. рис. 4), активная составляющая при этом уменьшается, а следовательно уменьшается и момент, т.е. S X2S
и током (см. рис. 4), активная составляющая при этом уменьшается, а следовательно уменьшается и момент, т.е. S X2S 
 M¯
M¯
На рис.3 ток, при S = 1 равен пусковому, который в 5¸7 раз больше номинального. При S = 0 ток I1 ¹ 0, т.к. при S = 0 двигателем потребляется реактивная мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.
При S = 0 ток ротора  , т.к.
, т.к. 
Кривая зависимости M = f(S) характеризуется тремя моментами:
а) Пусковой момент Мп при S = 1
б) Максимальный момент Мmax ® Sкр
в) Номинальный момент МН ® SН
Отношение максимального (критического) момента к номинальному, называется перегрузочной способностью