 2015-07-21
2015-07-21 3790
3790Радиолокационное поле активной радиолокации, формируемое CHK радиотехнических подразделений, является материальной основой, которая обеспечивает решение РТВ задач радиолокационной разведки, выдачи разведывательной и боевой информации. Сплошное радиолокационное поле создается с помощью зон обнаружения РЛС (трехкоординатных РЛС или дальномеров и радиолокационных высотомеров) и оценивается внешней границей (максимальной дальностью обнаружения  ). На заданной высоте, высотой нижней границы
). На заданной высоте, высотой нижней границы  и верхней границей
и верхней границей  . Зоны обнаружения РЛС, в свою очередь, должны быть такими, чтобы обеспечивать надежное обнаружение и проводку современных и перспективных СВН противника во всем диапазоне высот их полета на максимально возможной дальности. Выполнение требований к зоне обнаружения обеспечивается применением различных способов обзора пространства.
. Зоны обнаружения РЛС, в свою очередь, должны быть такими, чтобы обеспечивать надежное обнаружение и проводку современных и перспективных СВН противника во всем диапазоне высот их полета на максимально возможной дальности. Выполнение требований к зоне обнаружения обеспечивается применением различных способов обзора пространства.
Зоной обнаружения РЛС называется область пространства, в пределах которой РЛС обеспечивает обнаружение целей, обладающих заданной ЭПР, с вероятностями правильного обнаружения и ложной тревоги не хуже требуемых.
Для оценки параметров зоны обнаружения пользуются не пространственной зоной, а её полусечением вертикальной плоскостью (рис. 2.1)
Форма зоны обнаружения характеризуется зависимостью дальности обнаружения от высоты  . Параметрами зоны обнаружения РЛС являются минимальный (
. Параметрами зоны обнаружения РЛС являются минимальный ( ) и максимальный (
) и максимальный ( ) углы места, максимальные высота () и дальность () обнаружения цели. Угол места
) углы места, максимальные высота () и дальность () обнаружения цели. Угол места  (см. рис. 2.1) делит полусечение зоны обнаружения на два участка: изодальностный и изовысотный.
(см. рис. 2.1) делит полусечение зоны обнаружения на два участка: изодальностный и изовысотный.
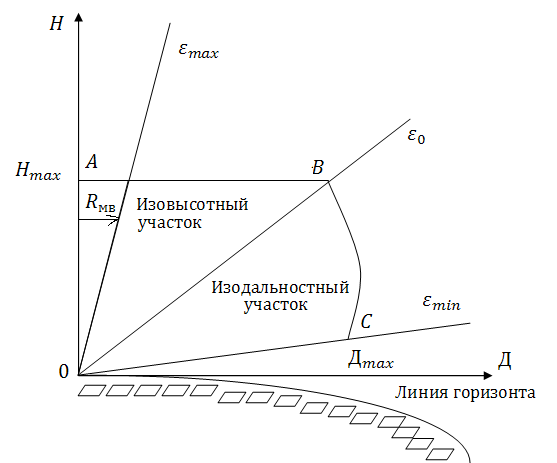
Рис. 2.1. Вид полусечения зоны обнаружения РЛС вертикальной плоскостью
Для изодальностного участка зоны обнаружения дальность обнаружения цели с заданной ЭПР  при
при  . Из треугольника ОАВ найдем дальность обнаружения цени в пределах изовысотного участка
. Из треугольника ОАВ найдем дальность обнаружения цени в пределах изовысотного участка
 .
.
Из треугольника ОВС находим  . Отсюда для некоторого фиксированного угла
. Отсюда для некоторого фиксированного угла  в пределах изовысотного участка зоны обнаружения
в пределах изовысотного участка зоны обнаружения  .
.
Таким образом, аналитическое выражение для зоны обнаружения РЛС как зависимость дальности обнаружения цели от угла места можно представить в виде
 , при
, при
 =
=  , при
, при 
0, при  и
и 
Такую форму зоны обнаружения называют комплексной.
Радиус мертвой воронки характеризует область зоны обнаружения, где цели под углами места не обнаруживается РЛС.
Параметры зоны обнаружения выбираются с учетом тактических требований и технических возможностей их реализации. Значение в РЛС сантиметрового диапазона ограничивается условиями распространения сантиметровых волн в приземном слое атмосферы. С одной стороны необходимо выбрать как можно более близким к нулю, с другой – необходимо оторвать ДНА от Земли, так как облучение земной поверхности в сантиметровом диапазоне волн приводит к сильной изрезанности зоны обнаружения на малых углах места вследствие интерференции прямого и отраженного от неровной поверхности лучей. Из-за движения под действием ветра, покрывающих земную поверхность кустов, травы и др. непрерывно изменяется амплитуда и фаза отраженного луча и, следовательно, непрерывно изменяется форма зоны. Поэтому практически в сантиметровом диапазоне выбирают  . Для снижении я до нуля и даже до отрицательных значений, где это позволяет позиция и высота подъема антенны, предусматривают изменение наклона антенны в вертикальной плоскости.
. Для снижении я до нуля и даже до отрицательных значений, где это позволяет позиция и высота подъема антенны, предусматривают изменение наклона антенны в вертикальной плоскости.
В метровом и нижней части дециметрового диапазона волн зона обнаружения формируется с учетом влияния Земли и значение для ровного участка поверхности практически однозначно определяется отношением длины  к высоте подъема
к высоте подъема  фазового центра антенны
фазового центра антенны  .
.
Максимальный угол места зоны обнаружения для исключения мертвой воронки желательно было бы выбирать равным 90° или близким к нему. Однако это привело бы к значительному усложнению конструкции антенной системы. В настоящее время считается целесообразным выбор значений порядка 35…45° в сантиметровом диапазоне и 20…30° – в метровом. При этом радиус мертвой воронки равный  составляет (1…1,5)
составляет (1…1,5)  и (2…4,5)
и (2…4,5)  соответственно.
соответственно.
Верхняя граница зоны обнаружения должна быть не меньше потолка полёта состоящих на вооружении и перспективных СВН противника. Для современным РЛС  .
.
СТР 3
---------------------------------------------------------------------------------------------------------------------
Максимальную дальность обнаружения целей, летящих на максимальной высоте , желательно получить равной дальности прямой видимости

где  в километрах,
в километрах,  и
и  - в метрах.
- в метрах.
Однако обеспечение таких дальностей обнаружения связано со значительным увеличением мощности передающего устройства и, как следствие, с увеличением стоимости и объема аппаратуры РЛС. Поэтому в настоящее время обеспечивают дальность обнаружения, близкую к дальности прямой видимости, только лишь для маловысотных целей, и целей с большими средними значениями ЭПР * (например, стратегических бомбардировщиков). По цели с  (истребитель) в РЛС обнаружения и наведения считается применимым получение дальности
(истребитель) в РЛС обнаружения и наведения считается применимым получение дальности  .
.
Дальность обнаружения целей РЛС определяется уравнением радиолокации, которое устанавливает связь тактических характеристик РЛС с техническими параметрами её системы, характеристиками цели и внешними условиями. Уравнение радиолокации является основой при проектировании РЛС любого назначения, предъявлении требований к основным трактам и системам, выборе оптимального режима работы в конкретной воздушной и поверхностной обстановке, оценке степени влияния качества эксплуатации на боевые возможности РЛС и т.д.
Представим уравнение радиолокации с учетом обзора РЛС зоны обнаружения произвольным способом:
 , (2.1)
, (2.1)
где  - дальность обнаружения цели РЛС в направлении с условными координатами
- дальность обнаружения цели РЛС в направлении с условными координатами  и
и  ;
;
СТР 4
---------------------------------------------------------------------------------------------------------------------
 - максимальная дальность обнаружения цели в зоне;
- максимальная дальность обнаружения цели в зоне;
 - нормированная дальность действия РЛС;
- нормированная дальность действия РЛС;
 - коэффициент усиления излучающей (передающей) антенны РЛС.
- коэффициент усиления излучающей (передающей) антенны РЛС.
 - энергия, излучаемая передающей антенной РЛС;
- энергия, излучаемая передающей антенной РЛС;
 - эффективная площадь приемной антенны в направлении с координатами и ;
- эффективная площадь приемной антенны в направлении с координатами и ;
 - максимальное значение эффективной площади приемной антенны;
- максимальное значение эффективной площади приемной антенны;
 - нормированная эффективная площадь приемной антенны;
- нормированная эффективная площадь приемной антенны;
 - средне значение ЭПР цели;
- средне значение ЭПР цели;
 - коэффициент различаемости (отношение сигнал/шум на входе приемника, при котором обеспечивается заданное качество обнаружения);
- коэффициент различаемости (отношение сигнал/шум на входе приемника, при котором обеспечивается заданное качество обнаружения);
 - отношение сигнал/шум на входе устройства сравнения с порогом, при котором обеспечивается заданное качество обнаружения;
- отношение сигнал/шум на входе устройства сравнения с порогом, при котором обеспечивается заданное качество обнаружения;
 - коэффициент потерь, учитывающий, во-первых, отличие параметров реальной пачки с прямоугольной огибающей; во-вторых, отличие реальной обработки отраженных сигналов от оптимальной;
- коэффициент потерь, учитывающий, во-первых, отличие параметров реальной пачки с прямоугольной огибающей; во-вторых, отличие реальной обработки отраженных сигналов от оптимальной;
 - спектральная плотность собственных шумов приемника, пересчитанная на его вход.
- спектральная плотность собственных шумов приемника, пересчитанная на его вход.
Преобразуем уравнение (2.1). Из теории антенны известно, что коэффициент усиления антенны в соответствии с его определением может быть представлен в виде
 , (2.2)
, (2.2)
где  - эквивалентный телесный угол диаграммы направленности излучающей антенны в направлении с угловыми координатами и .
- эквивалентный телесный угол диаграммы направленности излучающей антенны в направлении с угловыми координатами и .
СТР 5
---------------------------------------------------------------------------------------------------------------------
Подставив соотношения (2.2) в уравнение (2.1), получим
 (2.3)
(2.3)
В уравнении (2.3) отношение
 (2.4)
(2.4)
представляет собой энергию, излучаемую радиолокатором в единицу телесного угла зоны обнаружения. Интегрируя отношение (2.4) в пределах телесного угла зоны обнаружения  , получаем суммарную энергию, излучаемую РЛС в зону обнаружения за время однократного ее обзора:
, получаем суммарную энергию, излучаемую РЛС в зону обнаружения за время однократного ее обзора:
 (2.5)
(2.5)
где  - элементарный телесный угол.
- элементарный телесный угол.
Понятие телесный угол вводится по аналогии с понятием угол на плоскости. Из курса геометрии известно, что угол на плоскости определяется соотношением
 (2.6)
(2.6)
где  - длина дуги, вырезаемая углом на окружности с радиусом
- длина дуги, вырезаемая углом на окружности с радиусом  .
.
По аналогии с выражением (2.6)
 (2.7) где
(2.7) где  - площадь участка поверхности сферы с радиусом , вырезаемого телесным углом
- площадь участка поверхности сферы с радиусом , вырезаемого телесным углом  (рис. 2.2)
(рис. 2.2)
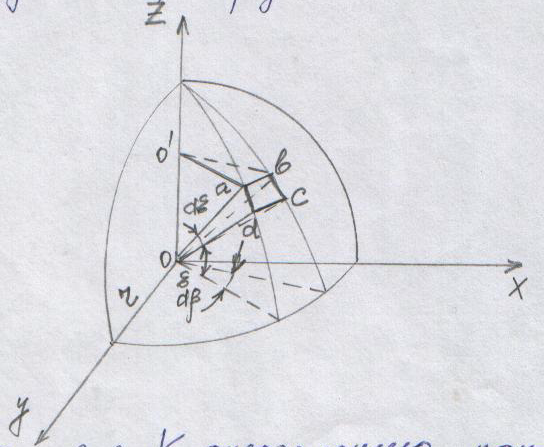
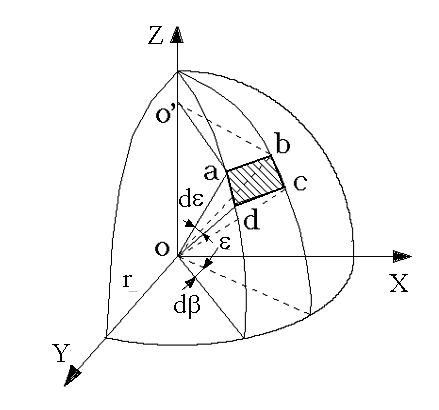
Рис. 2.2 К определению понятия телесного (пространственного) угла.
СТР 6
---------------------------------------------------------------------------------------------------------------------
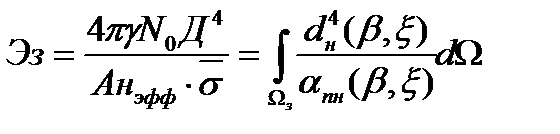
В соответствии с определением телесного угла элементарный телесный угол, входящий в (2.5):
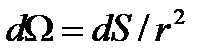 (2.8)
(2.8)
где  - площадь элементарного участка на поверхности сферы с радиусом, равным .
- площадь элементарного участка на поверхности сферы с радиусом, равным .
Значение находят, используя рис. 2.2:
 (2.9)
(2.9)
С учетом (2.8) и (2.9)
 (2.10)
(2.10)
После подстановки в соотношение (2.5) значения подынтегральной функции, найденного из (2.3), получаем
 (2.11)
(2.11)
Из последнего выражения находим
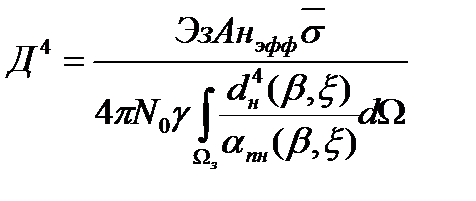 (2.12)
(2.12)
Уравнение (2.12) определяет максимальную дальность обнаружения РЛС цели с ЭПР в режиме обзора при произвольных способе обзора и форме зоны обнаружения. Из него следует, что максимальная дальность действия РЛС при заданных значениях энергии, излучаемой в зону за время однократного обзора, и эффективной площади приемной антенны зависит от формы зоны обнаружения (функция  в сферической системе координат с точностью до постоянного коэффициента определяет граничную поверхность зоны обнаружения) и способа просмотра зоны обнаружения приемной антенной РЛС (вид функциональной зависимости
в сферической системе координат с точностью до постоянного коэффициента определяет граничную поверхность зоны обнаружения) и способа просмотра зоны обнаружения приемной антенной РЛС (вид функциональной зависимости  определяется способом обзора зона обнаружения).
определяется способом обзора зона обнаружения).
Энергию, получаемую в зону обнаружения, можно выразить через среднюю мощность излучения и время облучения цели СТР 7
---------------------------------------------------------------------------------------------------------------------
 (2.13)
(2.13)
где  - средняя мощность, излучаемая передающей антенной РЛС в телесный угол диаграммы направленности;
- средняя мощность, излучаемая передающей антенной РЛС в телесный угол диаграммы направленности;
где  - длительность зондирующего импульса (в принципе может изменяться в зависимости от углового положения ДНА);
- длительность зондирующего импульса (в принципе может изменяться в зависимости от углового положения ДНА);
где  - число импульсов в пачке отраженных эхо-сигналов;
- число импульсов в пачке отраженных эхо-сигналов;
где  - время облучения цели для получения
- время облучения цели для получения  отраженных сигналов.
отраженных сигналов.
Из выражения (2.13) следует, что перераспределение энергии, излучаемой в зону обнаружения, возможно следующими способами:
Изменением средней мощности  в процессе обзора;
в процессе обзора;
Изменением времени облучения целей ;
Выбором формы диаграммы направленности передающей антенны 
СТР 8
---------------------------------------------------------------------------------------------------------------------








