 2015-07-21
2015-07-21 2186
2186При использовании частотного метода измерения дальности обычно применяется пилообразная или синусоидальная модуляция непрерывного зондирующего сигнала.
|

|
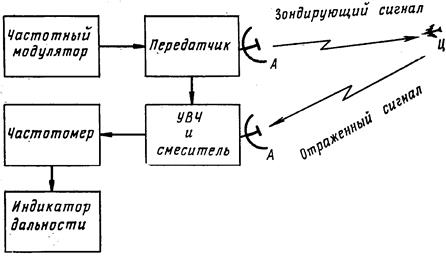
Рис.6.7. Структурная схема РЛС
с частотным методом измерения дальности.
Допустим, что частота зондирующего сигнала изменяется по пилообразному закону от fmin до fmax (рис.6.8,а), т.е. девиация частоты:
W = fmax – fmin.
Отраженные сигналы повторяют закон изменения частоты излучаемых колебаний со сдвигом на время запаздывания tD = 2D/c. Чем дальше находится цель, тем больше меняется частота передатчика за время распространения радиоволн до цели и обратно. Следовательно, разность частот между частотой зондирующего сигнала f1 и частотой колебаний, отраженных от цели f2 пропорциональна дальности до цели.
Таким образом, измерение дальности частотным методом сводится к измерению разностной частоты f1 – f2, т.е. частоты биений FB (рис.6.8,б).
FB = f1 – f2
|
|
|
|
|
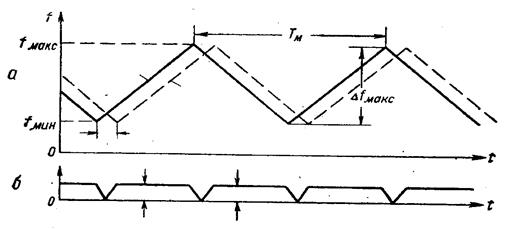
Рис.6.8. Измерение дальности неподвижной цели частотным методом:
а – график изменения частоты зондирующего и отраженного сигналов.
б – график разностной частоты (частоты биений).
Процесс образования колебаний с частотой биений FB поясняет рис.6.9. При построении вектор U1 принимается неподвижным, а вектор U2 – вращающимся относительно конца вектора U1 с разностной частотой ω1 – ω2.
|
|
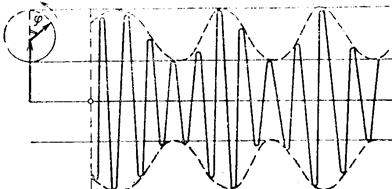
Рис.6.9. Процесс образования колебаний с частотой биений:
U1 – амплитуда колебания с частотой ω1;
U2 – амплитуда колебания с частотой ω2.
Частота биений выделяется в смесителе приемника РЛС и измеряется частотомером или анализатором частоты, проградуированным в единицах измерения дальности. Индикация сигналов цели осуществляется индикатором дальности.
Провалы, которые наблюдаются в графике частоты биений при равенстве частот излучаемых и принимаемых колебаний, не фиксируются частотомером, т.к. частотомер измеряет среднюю частоту биений за период модуляции TM (при условии, что tD «TM).
Для случая линейной частотной модуляции по пилообразному закону за период модуляции ТМ изменение частоты зондирующего сигнала равно 2W. Тогда скорость изменения частоты:
Δf/Δt = 
За время запаздывания отраженного сигнала tD частота передатчика изменяется на величину:
f1 – f2 =  tD
tD
Отсюда частота биений:
FB =  =
= 
Следовательно, дальность до цели:
D = 

