 2015-04-17
2015-04-17 1724
1724Данный метод занимается промежуточное место между методами максимума и минимума. Он обладает достаточно высокой (лучше, чем у метода максимума, хотя и ниже, чем у метода минимума) точностью измерения угловой координаты  объекта, причем уровень принимаемого радиосигнала имеет значительную (хотя и меньшую, чем в методе максимума) величину в момент определения . Реализация данных особенностей происходит благодаря наличию двух приемных диаграмм направленности, пересекающихся на уровне 0,7 от максимума этих диаграмм.
объекта, причем уровень принимаемого радиосигнала имеет значительную (хотя и меньшую, чем в методе максимума) величину в момент определения . Реализация данных особенностей происходит благодаря наличию двух приемных диаграмм направленности, пересекающихся на уровне 0,7 от максимума этих диаграмм.
Отметим, что направление «антенна-точка пересечения диаграмм» называется равносигнальным. Это означает, что если объект расположен на указанном направлении, то амплитуды радиосигналов, принятого от данного объекта, будут одинаковыми для обеих диаграмм направленности.
Принцип рассматриваемого метода заключается в том, что отсчет угловой координаты объекта происходит в тот момент, когда данный объект оказывается на равносигнальном направлении (рис. 3.27,а). Технически определение этого момента осуществляется с помощью вычитающего устройства, формирующего разность двух видеосигналов, поступивших на это устройство с выходов первого и второго радиоприемных устройств (рис. 3.27,б). Отсчет угловой координаты  выполняется, когда разностный сигнал на выходе вычитающего устройства принимает нулевое значение.
выполняется, когда разностный сигнал на выходе вычитающего устройства принимает нулевое значение.
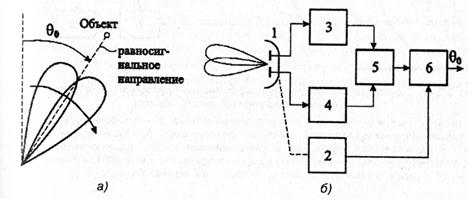 |
| Рис. 3.27. Метод сравнения: а – расположение диаграмм направленности в момент измерения угловой координаты объекта; б – упрощенная структура измерителя; 1 – приемная антенна; 2 – устройство сканирования осуществляющее поворот приемной антенны, а следовательно, и одновременное перемещение диаграмм направленности в пространстве; 3 – первое радиоприемное устройство; 4 – второе радиоприемное устройство; 5 – устройство вычитания радиосигналов; 6 – индикатор, фиксирующий значение угловой координаты объекта по нулевому напряжению с выхода устройства вычитания видеосигналов. |
Таковы основные амплитудные методы, употребляемые для определения угловой координаты объекта.
Между тем, в практике современных авиационных радиосистем весьма часто задача нахождения угловой координаты объекта решается путем использования комбинированных методов углометрии, в которых применяется не какой-либо единственный из рассмотренных выше амплитудных методов, а их совокупность. Необходимость обращения к комбинированным методам проистекает из двух следующих обстоятельств.
1. Наиболее точные базовые методы (минимума, сравнения) углометрии требуют для своей реализации наличия двух радиоприемных устройств с высокими требованиями к идентичности характеристик этих устройств, что в ряде случаев представляет собой достаточно трудоемкую задачу.
2. Очевидно, что максимально возможную точность углометрии можно получить, если подвергать необходимой обработке не видеосигналы с выходов радиоприемных устройств, а непосредственно радиосигналы, принятые из пространства (т.е. с выхода приемной антенны).
Обращение к комбинированным методам амплитудной углометрии позволяет повысить эффективность радиосистем измерения угловых координат. При этом наибольшее распространение получил суммарно-разностный метод. Структурная схема суммарно-разностного измерителя угловой (в одной плоскости) координаты объекта представлена на рис. 3.28. Работа этого измерителя осуществляется следующим образом.
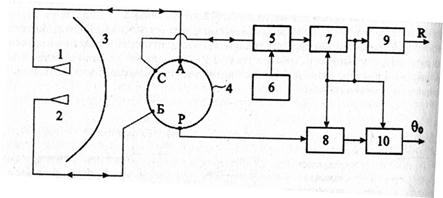 |
| Рис. 3.28. Структурная схема амплитудного суммарно-разностного измерителя угловой (в одной плоскости) координаты объекта: 1 – первая рупорная антенна; 2 – вторая рупорная антенна; 3 – параболический отражатель; 4 – кольцевой волноводный мост; 5 – антенный переключатель; 6 – радиопередающее устройство; 7 – радиоприемное устройство для суммарного сигнала; В – радиоприемное устройство для разностного сигнала; 9 – амплитудный детектор (совместно с устройством измерения дальности); 10 – фазовый детектор (совместно с устройством индикации угла). |
Рассмотрим режим излучения.
Радиопередающее устройство 6 формирует мощный радиоимпульс, заполненный высокочастотным колебанием, которое имеет длину волны  . Этот радиоимпульс поступает на антенный переключатель 5 и далее на отвод С кольцевого волноводного моста 4.
. Этот радиоимпульс поступает на антенный переключатель 5 и далее на отвод С кольцевого волноводного моста 4.
Построение кольцевого волноводного моста схематически показано на рис. 3.29. Это устройство представляет собой кольцевой волновод, протяженность (длина окружности) которого равна 1,5 , и который обладает четырьмя волноводными отводами (А, Б, С, Р), расположенными на строго определенных расстояниях друг относительно друга. Такая конфигурация позволяет использовать один и тот же кольцевой волноводный мост как в режиме излучения, так и в режиме приема радиосигналов.
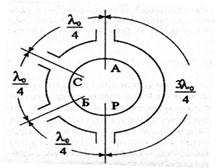 |
| Рис. 3.29. Кольцевой волноводный мост |
В частности, в режиме излучения высокочастотный радиоимпульс, поступивший на отвод С (выполняющий в данном случае роль входа), начинает распространяться (разветвляться) по кольцевому волноводному мосту в двух направлениях от отвода С в стороны отводов А и Б. Поскольку расстояния СА и СБ одинаковы (равны О,25 ), то фазы радиоимпульсов. пришедших к отводам А и Б, окажутся равными друг другу. Это означает, что излучение из рупорных антенн 1 и 2, соединенных' с соответствующими отводами А и Б, будет синфазным. Однако не весь радиосигнал, поступивший на отвод С, будет излучен через отводы А и Б. Часть этого радиосигнала двинется по кольцевому волноводному мосту далее – от отводов А и Б к отводу Р. Поскольку разница расстояний АР и БР равна 0,5 , то радиосигналы, пришедшие к отводу Р, окажутся в противофазе и взаимно погасят друг друга, т. е. излучаемый радиоимпульс не поступит в приемное устройство (рис. 3.28), а будет подан только на рупорные антенны 1 и 2.
На рис. 3.30, а приведены диаграммы направленности каждой из рупорных антенн (рассматриваемой в совокупности с параболическим отражателем) вне зависимости от фазовых соотношений между излучаемыми радиосигналами. Из этого рисунка видно, что параболоид, зеркально отражающий радиоволны, направляет излучение из вышерасположенного рупора 1 несколько ниже (луч 1) своей оптической оси, а радиосигнал из нижерасположенного рупора 2 – немного выше (луч 2) той же оптической оси.
На рис. 3.30, б показана результирующая диаграмма направленности всей антенной системы «два рупора – параболоид» для случая синфазного излучения из рупорных антенн. Как видим, результирующая диаграмма направленности в режиме излучения имеет один максимум, ориентированный по оптической оси антенной системы «два рупора – параболоид», Иными словами, в режиме излучения реализуется уже известный метод максимума.
 |
| Рис. 3.30. Пространственные полевые характеристики амплитудного суммарно-разностного измерителя (рис. 3.28) угловой (в одной плоскости) координаты объекта: а – реальные диаграммы направленности для совокупностей «первая рупорная антенна – параболический отражатель» (кривая 1) и «вторая рупорная антенна – параболический отражатель» (кривая 2); б – реальная диаграмма направленности для антенной системы «первая рупорная антенна – вторая рупорная антенна – параболический отражатель»; в – эквивалентная разностная диаграмма направленности |
Рассмотрим режим приема.
Предположим, что объект находится строго на оптической оси антенной системы. В этом случае радиосигнал (в виде электромагнитного поля), отраженный от объекта, сначала попадает на поверхность параболоида, после чего будет принят обеими рупорными антеннами и, наконец, поступит на входы А и Б кольцевого волнового моста. Поскольку объект расположен на оптической оси, то расстояния от этого объекта до рупоров 1 и 2 (с учетом отражения от параболоида) окажутся одинаковыми. Это означает, что отраженные от объекта электромагнитные радиосигналы придут в точки А и Б кольцевого волноводного моста в фазе.
Рассмотрим процесс распространения принятого электромагнитного радиосигнала внутри кольцевого волноводного моста. Разветвление поля от точек А и Б в обе стороны начинается одновременно. Поскольку расстояния (по коротким дугам окружности) от точке А и Б до точки С одинаковы (равны 0,25 ), то данные электромагнитные сигналы в точке С окажутся в фазе и, естественно, просуммируются. Поэтому точка С обозначена первой буквой слова «сумма». Другая точка кольцевого волноводного моста, точка Р, имеет название, происходящее от начальной буквы слова «разность». В самом деле, электромагнитные радиоволны, попадающие в точку Р от точек А и Б, окажутся в точке Р в противофазе (разность хода этих радиоволн равна 0,75 – 0,25 = 0,5 ), т. е. вычтутся друг из друга. А так как амплитуды отраженных радиосигналов будут в рупорах 1 и 2 одинаковыми, то разность данных радиосигналов в точке Р будет равна нулю. Иными словами, если объект расположен на оптической оси антенны, то на. вход приемного канала измерения угла (блоки 8 и 10 на рис. 3.28) ничего не поступит. Это будет соответствовать ситуации «угол отклонения объекта от оптической оси антенны равен нулю» В то же время суммарный радиосигнал, поданный на вход канала измерения дальности R (блоки 5, 7 и 9 на рис. 3.28), будет иметь значительную величину и использоваться для определения расстояния до объекта.
Теперь предположим, что объект не расположен на оптической оси антенны (направление на объект образует угол с оптической осью антенны). Это означает, что результирующие (с учетом факта отражения от параболоида) расстояния от объекта до рупоров 1 и 2 будет неодинаковыми. Используя рассуждения, аналогичные предшествующим, получим, что в точке С кольцевого волноводного моста произойдет неполное (уменьшенное по сравнению с предыдущим случаем) суммирование, а в точке Р – неполное вычитание радиосигналов. При, этом разность, получившаяся в результате неполного вычитания, может иметь знак «+» (если угол – положительный), либо знак «–«(если угол – отрицательный). Следовательно, знак разностного (в точке Р) радиосигнала несет в себе информацию о стороне (вверх или вниз) отклонения объекта от оптической оси антенны. С другой стороны, при сравнительно небольших отклонениях объекта от оптической оси антенны будет сохраняться зависимость «при увеличении , растет величина разностного сигнала на выходе Р, т.е. информация о значении углового отклонения объекта заложена в уровне разностного сигнала.
Сказанное означает, что если представить информацию о знаке и интенсивности разностного радиосигнала в графической форме, а именно в виде эквивалентной (не существующей в виде реального поля, но отражающей операции, выполняемые кольцевым волноводным мостом) приемной диаграммы направленности, то мы придем к рис. 3.30, в). Иными словами, в данном случае измерение углового положения объекта осуществляется, фактически, методом минимума, то есть с наивысшей точностью.
Отметим особенность рассмотренного измерителя, связанную с наличием регулирующих связей (с выхода блока 7 на блоки 7,8 и 10 – рис. 3.28). Данные связи необходимы для коррекции (обратно пропорционально мощности суммарного сигнала) коэффициента усиления в блоке 7 и выравнивания коэффициентов усиления в блоках 7, 8 и 10, в результате чего обеспечивается идентичность характеристик суммарного и разностного каналов.
Таков принцип работы суммарно-разностного измерителя угловой координаты объекта, осуществляющего измерение этой координаты лишь в одной плоскости. В реальных условиях измерение угловых координат (азимута  и угла места
и угла места  ) объекта выполняется, разумеется, в двух плоскостях – азимутальной и угломестной.
) объекта выполняется, разумеется, в двух плоскостях – азимутальной и угломестной.
Структурная схема суммарно-разностного измерителя угловой координаты объекта, выполняющего это измерение в двух плоскостях, показана на рис 3.31.
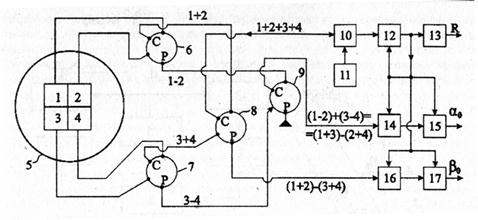 |
| Рис. 3.31. Структурная схема амплитудного суммарно-разносного измерителя угловых (в двух плоскостях) координат объекта: 1 – первая рупорная антенна (раскрыв); 2 – вторая рупорная антенна (раскрыв); 3 – третья рупорная антенна (раскрыв); 4 – четвертая рупорная антенна (раскрыв); 5 – параболический отражатель (раскрыв); 6 – первый кольцевой волноводный мост; 7 – второй кольцевой волноводный мост; 8 – третий кольцевой волноводный мост; 9 – четвертый кольцевой волноводный мост (выход Р подан на согласованную нагрузку); 10 – антенный переключатель; 11 – радиопередающее устройство; 12 – радиоприемное устройство для суммарного сигнала; 13 – амплитудный детектор (совместно с устройством измерения дальности); 14 – радиоприемное устройство для разностного (по азимуту) сигнала; 15 – первый фазовый детектор (совместно с устройством индикации азимута); 16 – радиоприемное устройство для разностного (по углу места) сигнала; 17 – второй фазовый детектор (совместно с устройством индикации угла места). |
Как видно из этого рисунка, формирование суммарного и разностного сигналов производится системой из четырех волноводных мостов (а не двух, как можно было бы предположить, исходя из рассмотрения рис. 3.28). В остальном работа данного измерителя происходит аналогично функционированию схемы, представленной на рис 3.28, хотя в нее добавлен еще один разностный канал.

