 2015-07-14
2015-07-14 1017
1017Для исследования несимметричных двухфазных микромашин могут использоваться различные методы.
1. Метод двух реакций. Суть метода заключается в том, что намагничивающие силы, поля и потокосцепления обмоток статора и ротора раскладываются по двум взаимно перпендикулярным осям. Метод особенно эффективен при анализе явнополюсных синхронных микромашин с неравномерным воздушным зазором.
2. Метод вращающихся полей. Он основан на представлении любой m - фазной машины суммой m однофазных машин, в каждой из которых имеются прямо и обратно вращающиеся поля.
3. Метод симметричных составляющих. По существу сводится к тому, что двухфазная несимметричная система токов или НС раскладывается на две симметричные системы: прямую и обратную, каждая из которых создает свое круговое магнитное поле, вращающееся в прямом или обратном направлении. Метод получил наибольшее признание в трудах Ю.С.Чечета и его учеников Ф.М.Юферова, Е.М.Лопухиной и др.
Подавляющее большинство современных микромашин переменного тока имеют на статоре две обмотки, сдвинутые в пространстве на 90 эл. градусов, что продиктовано стремлением получить максимальное круговое поле при минимальных токах в обмотках. Вместе с тем, редко удается сдвинуть токи в обмотках на угол, равный 90о во времени. Поэтому на практике чаще приходится иметь дело с несимметричными временными системами токов, намагничивающих сил, магнитных потоков и т.д.
Согласно методу симметричных составляющих любую систему двух векторов А и В разных по величине, сдвинутых во времени на произвольный угол, можно разложить на две симметричные составляющие системы равных по величине векторов и сдвинутых во времени на 90º.
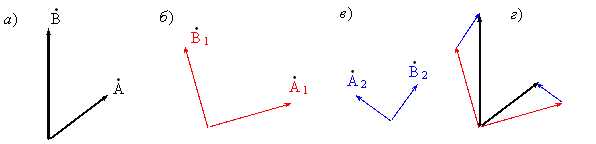
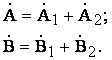
Рис. 1.4. Несимметричная система векторов (а) и ее симметричные составляющие (б, в, г).
Одна из симметричных систем имеет порядок чередования векторов, совпадающий с исходной, и называется прямой последовательностью, другая имеет обратный порядок чередования векторов и называется обратной последовательностью (рис. 1.4).
Выразим заданные векторы A и B через симметричные составляющие
 (1.11)
(1.11)
Как видно из рис. 1.4, симметричные составляющие связаны между собой соотношением:
 (1.12)
(1.12)
Подставляя (1.12) в (1.11) и решая уравнения с двумя неизвестными, получим выражения симметричных составляющих через векторы исходной системы [1]:
 (1.13)
(1.13)
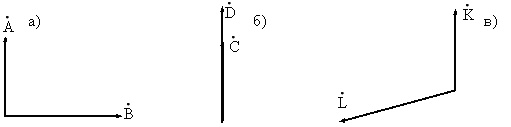
На рис. 1.5 выполнено графическое разложение несимметричной системы векторов A и B на симметричные составляющие с использованием уравнений (1.12) и (1.13).
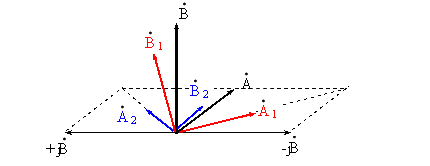
Рис.1.5. Графическое разложение несимметричной системы векторов на симметричные составляющие
На практике при анализе двухфазных микромашин в качестве векторов A и B используют векторы НС FA и FB, потоков ΦA и ΦB, токов IA и IB и т.д.
Метод симметричных составляющих пригоден не только для анализа несимметричных двухфазных микромашин, но и как предельный случай несимметрии – однофазных микромашин, полагая, что ток и его симметричные составляющие в одной из обмоток, которой фактически нет, равен нулю.
Задача 1.5. Разложить графически несимметричные системы векторов на симметричные составляющие.
ЛЕКЦИЯ 3
§ 1.7. Схемы замещения несимметричных двухфазных микромашин

Примем за базовую микромашину машину с двумя обмотками на статоре А и В, сдвинутыми в пространстве на угол 90 эл. градусов. Обмоткипитаются от сети несимметричных переменных напряжений  и
и  . В цепь обмотки В включен конденсатор С. Ротор - короткозамкнутый (рис.1.6,а).
. В цепь обмотки В включен конденсатор С. Ротор - короткозамкнутый (рис.1.6,а).
Напряжения и можно представить как сумму падений напряжений  ,
,  и
и  ,
,  от токов прямой и обратной последовательностей на сопротивлениях ZA1, ZA2, ZB1, ZB2 :
от токов прямой и обратной последовательностей на сопротивлениях ZA1, ZA2, ZB1, ZB2 :
 (1.14)
(1.14)
Важно отметить, что в общем случае векторы напряжений , и , не образуют двух симметричных систем напряжений. На симметричные составляющие раскладываются лишь векторы токов, а сопротивления фаз различны из-за наличия конденсатора в фазе В.
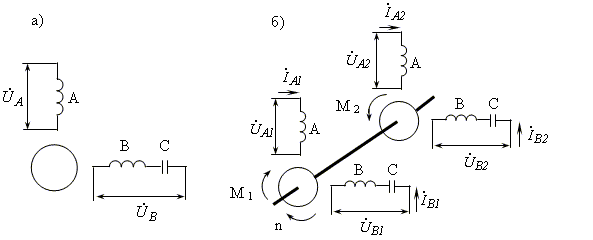
Рис.1.6. Схема базовой машины (а) и ее физическая модель (б).
Токи прямой и обратной последовательностей создают круговые вращающиеся магнитные поля. Поэтому машину на рис.1.6, а можно заменить физической моделью, состоящей из двух симметричных машин, расположенных на одном валу и развивающих встречно-направленные моменты (рис.1.6, б). Поскольку прямое поле больше обратного, "прямая" машина мощнее "обратной", поэтому общий вал вращается в прямом направлении со скоростью n. При этом ротор прямой машины вращается по полю – она работает в режиме асинхронного двигателя. Скольжение ротора s= (n1 - n)/n1. Ротор обратной машины вращается встречно обратному полю - она работает в режиме электромагнитного тормоза. Скольжение ротора относительно этого поля будет
s2 = (n1 + n)/n1 = [n1 + n1(1 - s)]/n1 = 2 - s.
В соответствие с физической моделью базовой машины для несимметричного двухфазного микродвигателя можно построить 4 схемы замещения: две для токов прямой и обратной последовательностей фазы А, две для токов прямой и обратной последовательностей фазы В. Эти схемы представлены на рис. 1.7
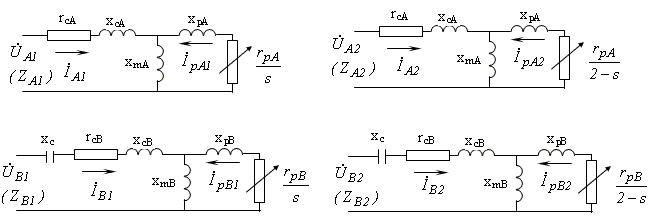
Рис.1.7. Схемы замещения несимметричной двухфазной машины
В схемах замещения:
rсA, rcBв, xcA, xcB - активные и реактивные сопротивления обмоток статора соответственно фаз А и В;
rpA, rpB, xpA, xpB - приведенные к статору (соответственно к числу витков фаз А и В) активные и реактивные сопротивления ротора;
xmA, xmB - индуктивные сопротивления взаимоиндукции между статором и ротором соответственно фаз А и В;
xс - реактивное сопротивление конденсатора.
Приведенные на рис. 1-7 схемы замещения в контуре намагничиванияне содержат активных сопротивлений, с помощью которых учитываютсяпотери в стали. Это намного упрощает математический анализ и выражения ряда величин, получаемых из схем замещения. Учет же потерь в стали микромашин производится иначе (см. далее).
Схемы замещения, приведенные на рис. 1.7, можно преобразовать, заменивпараллельное соединение сопротивлений на последовательное (рис. 1.8).

Рис.1.8. Преобразованные схемы замещения несимметричной двухфазной машины
Здесь (для фазы А):
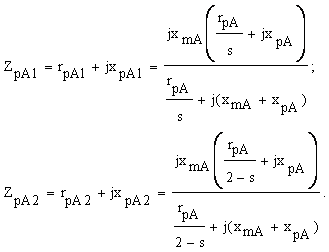 (1.15)
(1.15)
Умножив числители и знаменатели этих выражений на сопряженные комплексы соответствующих знаменателей и разделив действительные и мнимые части комплексов, после преобразований получим выражения активных и реактивных сопротивлений параллельных ветвей:
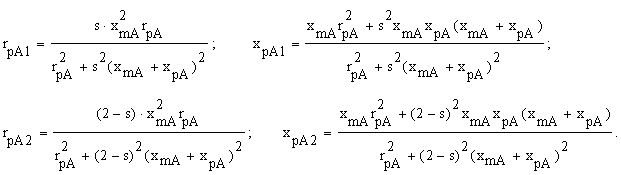 (1.16)
(1.16)
Выражения сопротивлений фазы В будут иметь аналогичный вид с разницей лишь в индексах.
Если сложить соответственно активные и реактивные сопротивления преобразованных схем замещения, получим весьма простые схемы.
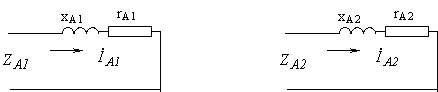

Рис.1.9. Окончательные схемы замещения несимметричных двухфазных микромашин
Однако эта простота обманчива, ибо все сопротивления в схемах замещения рис. 1.9 являются переменными, зависящими от скольжения S.
Полные их значения равны:
ZА1 = rА1 + jxА1 = (rсА + rрA1) + j(xсА + xрA1) (1.17)
ZA2 = rА2 + jxА2 = (rсА + rрA2) + j(xсА + xрA2) (1.18)
ZВ1 = rВ1 + jxВ1 = (rсВ + rрВ1) + j(xсВ - xc + xрB1) (1.19)
ZВ2 = rВ2 + jxВ2 = (rсВ + rрВ2) + j(xсВ - xc + xрВ2) (1.20)
Параметры схемы замещения фазы В можно выразить через параметры фазы А. Если обмотки А и В занимают равное число одинаковых по форме пазов статора NZA = NZB = NZС/2:
| rсВ = k2rсА; хсВ = k2xсА; xmВ = k2xmА; xрВ = k2xрА; rрВ = k2rрА, | (1.21) |
где k = wВkоб.В/(wАkоб.А) - коэффициент трансформации двигателя.
Часто в двухфазных двигателях обмотки А и В занимают неодинаковое число пазов статора. Так, в двигателях с пусковым элементами рабочая обмотка укладывается в 2/3 пазов статора (NZA = 2/3·NZC), а пусковая – в 1/3 пазов (NZВ = 1/3·NZC). В этом случае [1]:
rcB= k2a· (kобА/kобВ)2rcA;xcB= k2a· (kобА/kобВ)2xcA, (1.22)
где: a = NZA/NZB, - соотношение числа пазов, занимаемых обмотками статора; k = wB/wA– коэффициент трансформации, равный отношению числа физических витков обмотки В к числу физических витков обмотки А.
Параметры ротора и контура намагничивания выражаются, как и в первом случае.
Задача 1.6. При каком условии сопротивление схемы замещения ZA1 будет равно сопротивлению схемы замещения ZA2, а ZB1 = ZB2?
ЛЕКЦИЯ 4
§ 1.8. Уравнения токов
Повторим еще раз уравнения (1.14):

Согласно методу симметричных составляющих

где wэА = wАkоб.А wэВ = wВkоб.В - эффективные числа витков фаз А и В.
Разделив левую и правую части последних выражений на wэB, получим
 (1.23)
(1.23)
где k = wэВ/wэА- уже известный коэффициент трансформации двигателя. Подставляя (1.23) в выражение  B и решая систему двух уравнений относительно I A1, I A2, получим
B и решая систему двух уравнений относительно I A1, I A2, получим
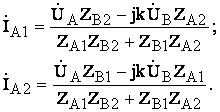 (1.24)
(1.24)

Рассчитав I A1 и I A2, легко определить I B1 и I B2, а затем найти полные токи фаз А и В.








