 2015-07-14
2015-07-14 421
421
 Свойства и поведение асинхронного исполнительного двигателя определяются механическими и регулировочными характеристиками.
Свойства и поведение асинхронного исполнительного двигателя определяются механическими и регулировочными характеристиками.
В общем случае напряжения и образуют несимметричную систему векторов (рис.1.5).
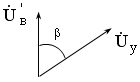
Рис. 1.5.
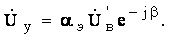
Используя понятие эффективного коэффициента сигнала, можно записать
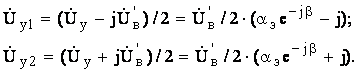 Симметричные составляющие напряжения управления будут:
Симметричные составляющие напряжения управления будут:
Переходя от показательных функций к тригонометрическим и учитывая, что e-jb = cosb - jsinb, подставим полученные значения Uу1 и Uу2 в (1.1)
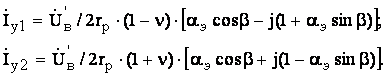 (1.2)
(1.2)
Электромагнитная мощность с точки зрения передачи энергии со статора на ротор представляет собой сумму электромагнитных мощностей прямой и обратной последовательностей. При круговом поле они равны потерям в роторе, деленным на скольжения /в нашем случае на (1 - n) и (1 + n)/

Так как по отношению к полю прямой последовательности машина работает в режиме двигателя, а по отношению к полю обратной последовательности в режиме электромагнитного тормоза, то результирующий момент М равен

Подставим в это уравнение квадраты модулей токов Iу1 и Iу2 из (1.2). После преобразований, получим:
Выразим момент двигателя в относительных единицах. За базисный возьмем пусковой момент, развиваемый двигателем при круговом поле (aэ= 1, sinb= 1, n = 0)
Тогда момент в относительных единицах (m = M/Mб)
 (1.3)
(1.3)
Уравнение (1.3) есть аналитическое выражение механических характеристик идеального асинхронного исполнительного двигателя, под которыми понимают зависимость момента от угловой скорости вращения при постоянном коэффициенте сигнала.
Решив уравнение (1.3) относительно n, получим выражение регулировочных характеристик, которые показывают зависимость угловой скорости вращения от коэффициента сигнала при постоянном моменте на валу
 (1.4)
(1.4)
Рассмотрим механические и регулировочные характеристики а также характеристики мощности при различных способах управления идеальным асинхронным исполнительным двигателем.
ЛЕКЦИЯ 18
2. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА

Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление.








