 2015-07-14
2015-07-14 330
330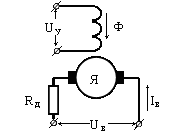
Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении
Схема управления приведена на рис.2.4 Напряжение управления подается на обмотку главных полюсов, напряжение возбуждения - на обмотку якоря, по которой в течение всего времени работы двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для его ограничения включают дополнительное сопротивление Rд.
Если пренебречь насыщением магнитной цепь, можно считать Ф = kфUу = kфaUв. Тогда ток якоря

Вращающий момент

Принимая за базовый момент пусковой (n = 0, a =1))

получим относительное значение момента
 С учетом (2.2) уравнение механической характеристики примет вид
С учетом (2.2) уравнение механической характеристики примет вид
Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх= mn = an - a2n2. Скорость, при которой наступает максимум мощности nм = 0,5/a. Тогда максимальная механическая мощность будет
Мощность управления


Мощность возбуждения рв = UвIв. Подставляя значение тока, получим
На рис. 2.5, а представлены механические, на рис. 2.5, б - регулировочные характеристики, а на рис. 2.6 показана зависимость рмх = f(n) исполнительного двигателя при полюсном управлении.
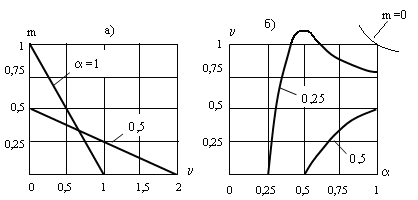
Рис.2.5. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при полюсном управлении
Проанализируем эти графики.
Механические характеристики линейные, но непараллельные, к тому же и неоднозначные (одну и ту же частоту вращения можно получить при разных значениях a). Пусковой момент прямо-, а частота вращения холостого хода обратно пропорциональны коэффициенту сигнала и при малых a может существенно превышать номинальную, что безусловно опасно для двигателя.
Регулировочные характеристики нелинейные, а при m < 0,5 неоднозначные. По этой причине полюсное управление используют лишь при m > 0,5.
Мощность управления пропорциональна квадрату коэффициента сигнала и не зависит от частоты вращения. Она значительно меньше, чем при якорном управлении, что является достоинством данного способа.
Мощность возбуждения с увеличением частоты вращения уменьшается и тем быстрее, чем больше a.
Максимум механической мощности не зависит от коэффициента сигнала, что также можно отнести к достоинствам полюсного управления.
Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения.








