 2015-07-14
2015-07-14 699
699Дифференциальные сельсины (ДС) применяются в тех случаях, когда приемная ось должна поворачиваться на угол, равный с у м м е или р а з н о с т и углов поворота двух задающих осей. На рис.5.15 представлена схема индикаторной связи с использованием в качестве приемника дифференциального сельсин.
Конструктивно дифференциальный сельсин не отличается от асинхронного двигателя с фазным ротором.
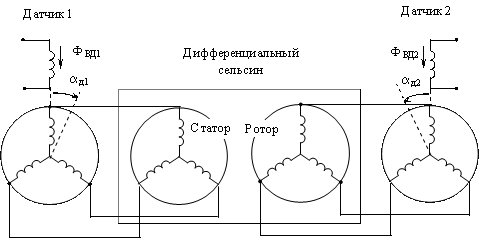
Рис. 5.15. Система синхронной связи с дифференциальным сельсином
Магнитные потоки возбуждения первого и второго датчиков Фв1, Фв2 индуцируют в обмотках синхронизации ЭДС, под действием которых протекают токи и возникают магнитные потоки статора и ротора дифференциального сельсина Фс, Фр. В согласованном положении (aд1 = 0, aд2 = 0) эти потоки совпадают и момент ДС равен нулю (рис. 5.16, а).
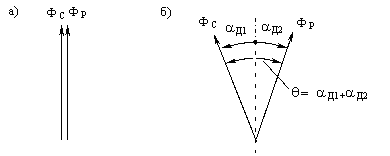
Рис. 5.16. К вопросу о работе дифференциального сельсина
При повороте датчиков на углы aд1 и aд2на такие же углы, но в обратном направлении (см. § 5.6) повернутся магнитные потоки статора и ротора ДС. Между ними образуется уголq в данном случае равныйсумме углов aд1 и aд2(рис.5.16 б). Стремление потоков Фс, Фр снова придти в согласованное положение приводит к образованию вращающего момента ДС, под действиемкоторого его ротор поворачивается на уголq. Направление поворота ротора ДС всегдасовпадает с направлением поворота вектора Фр к вектору Фс. Если датчики повернуть на углыaд1 и aд2в одном направлении, ротор ДС повернется на угол q, равный их разности.








