2015-07-14
2015-07-14 807
807Важной характеристикой ШД является зависимость статического синхронизирующего момента от электрического угла рассогласования qэл, т.е. зависимость вращающего момента при установившемся токе в обмотке управления от угла между осью ротора и осью возбужденного полюса статора. Для двигателя с симметричным ротором эта зависимость близка к синусоидальной M = Mmaxsinq (рис.3.5,а). Для двигателя с клювообразными полюсами эта зависимость имеет вид несимметричной кривой (рис.3.5,б). Полуволны кривой M(q), оставаясь равновеликими по площади, имеют различную протяженность: по оси q длительность ускоряющей полуволны p + bэл, а тормозящей p- bэл, где bэл – угол смещения кривой.
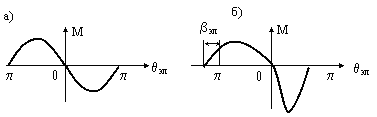
Рис. 3.5. Статический синхронизирующий момент: а) – для симметричного ротора; б) – для клювообразного ротора
В шаговых двигателях НС статора перемещается по окружности статора не плавно, как в обычных синхронных двигателях, а скачкообразно. Последнее обуславливает ряд особенностей ШД.
Допусти, что ротор ШД, нагруженного моментом Мн, имел угол рассогласования q1. Произошло переключение обмоток статора и НС скачком переместилась на угол a, равный шагу двигателя (рис.3.6,а). На такой же угол переместится и кривая синхронизирующего момента. В данном случае момент ШД возрасте на величину DM, вследствие чего ротор начнет перемещаться в новое положение. Когда ротор повернется на угол a, превышение момента станет равным нулю. Система придет в новое согласованное положение с углом рассогласования q2.
Однако такое перемещение ротора возможно, если переключение обмоток статора не переводит ШД в зону неустойчивой работы. Если же угол a, т.е. шаг будет большим (рис. 3.6,б), то момент двигателя станет меньше момента нагрузки, ротор перейдет в зону неустойчивой части угловой характеристики, он не будет следовать за полем статора и потеряет шаг – произойдет сбой в работе.
Для того, чтобы двигатель не терял шаг, необходимо, чтобы выполнялось определенное соотношение между максимальным синхронизирующим моментом Мmax, моментом сопротивления Мн и числом устойчивых положений n: Mн < Mmaxcos(p/n). Чем больше n (мельче шаг), тем большим моментом можно нагружать ШД. В пределе, когда n ®¥, условие устойчивой работы ШД ничем не отличается от условия статической устойчивости обычных синхронных двигателей (Mн < Mmax).
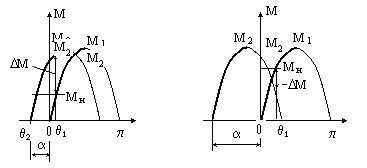
Рис. 3.6. Статические механические характеристики ШД: М1 – до переключения обмоток; М2 – после переключения обмоток