 2015-07-14
2015-07-14 1825
1825У практиці використання цифрових автоматів можна виділити невелику кількість типових алгоритмів їх функціонування.
Залежно від способу організації функції виходу синхронні автомати діляться на автомати Мілі (Mealy), або автомати I роду і автомати Мура (Moore) - автомати II роду.
У автоматах Мілі - вихідний сигнал y(t) однозначно визначається вхідним сигналом x(t) і станом q(t - 1) автомата в попередній момент часу (t - 1). Математичною моделлю таких автоматів служить система рівнянь:
У автоматах Мура вихідний сигнал y(t) однозначно визначається вхідним сигналом x(t) і станом q(t) в даний момент часу t. Математичною моделлю таких автоматів є система:

Приведені рівняння описують функціонування автомата I роду (автомат Мілі), вихідні сигнали якого формуються у момент переходу автомата з одного стану в інший. Якщо вихідні сигнали автомата залежать тільки від станів елементів пам'яті, то такий автомат називається автоматом II роду (автомат Мура). Вихідні сигнали останнього формуються у момент фіксації чергового стану.
Цифровий автомат (першого або другого роду) називається правильним, якщо вихідний сигнал y(t) визначається одним лише його станом (q(t - 1) або q(t)) і не залежить явно від вхідного сигналу x(t).
Різниця між автоматами Мілі і Мура полягає лише в тому, що вихідний сигнал останнього залежить тільки від його внутрішнього стану, у той час як в автомата Мілі значення вихідного сигналу залежить також і від вхідного сигналу.
У ЦА Мілі вихідний сигнал є тільки тоді, коли є вхідний сигнал, а у ЦА Мура вихідний сигнал є завжди. Доцільно вважати, що вихідний сигнал у ЦА Милі носить імпульсний характер, а у ЦА Мура - потенційний характер.
1.2.2 Поєднана модель автомата (С-автомат).
Абстрактний С-автомат - математична модель дискретного пристрою, яка визначається множиною з 8 елементів: S=(Q, X, W, U, d, l1, l2, q1), де:
Q={q1, q2,.., qm} -множина станів;
X = {x1, x2,.., xf} - множина вхідних сигналів;
W={w1, w2,.., wg}- множина вихідних сигналів типу 1,вихідний абстрактний алфавіт автомата Мілі;
U = {u1, u2,.., uh}- множина вихідних сигналів типу 2, вихідний абстрактний алфавіт автомата Мура;
d: Q´ X® Q - функція переходів;
q1 Î Q - початковий стан автомата;
l1: Q´X® W - функція виходів;
l2: Q´X® U- функція виходів.
Абстрактний С -автомат можна представити у вигляді пристрою з одним входом, на який поступають сигнали з вхідного алфавіту X, і двома виходами, на яких з'являються сигнали з алфавітів W і U (рис. 1.). Відмінність С -автомата від моделей Мілі і Мура полягає в тому, що він одночасно реалізує дві функції виходів l1 і l2, кожна з яких характерна для цих моделей окремо. С-автомат можна описати наступними рівняннями:
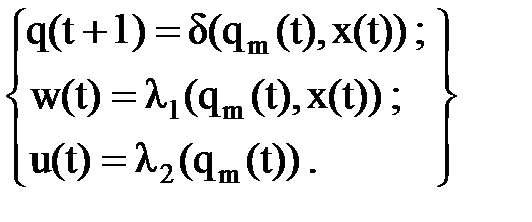
Рисунок 1. 3 – Абстрактний С-автомат
Вихідний сигнал uh =  2(qm) видається увесь час, поки автомат знаходиться в деякому стані qm. Вихідний сигнал wg = 1(qm, xf) видається під час дії вхідного сигналу xf при знаходженні автомата в стані qm.
2(qm) видається увесь час, поки автомат знаходиться в деякому стані qm. Вихідний сигнал wg = 1(qm, xf) видається під час дії вхідного сигналу xf при знаходженні автомата в стані qm.








