 2015-07-14
2015-07-14 692
692Машины, способные из наваленной рыбы поштучно выдать рыбу в определенном положении и подать ее в рыборазделочную или другую машину, называют загрузочными. Основной частью таких машин являются узлы ориентирования и поштучной выдачи рыб. Рыбу равномерно извлекают из кучи (из бункера), подают на ориентирующую плоскость (при необходимости с плоскости удаляют излишек рыбы). Рыба, поданная на колеблющуюся плоскость, сначала ориентируется головой вперед по движению, затем разворачивается спинкой или брюшком вверх и, наконец, передается в рыборазделочную машину. Если будет загружаться, например, нанизочная машина, то достаточно рыбу ориентировать только головой вперед и затем подавать ее в машину.
Загрузочная машина представлена на рис. 24. Машина состоит из колеблющейся плоскости, состоящей из двух секций. Каждая секция создает два потока рыб, движущихся головой вперед в одном направлении.
Рыба, двигающаяся в центральных ручьях налево, дисками переводится в параллельный ручей. Диски могут как вращаться, так и колебаться. Рыбы, покидая колеблющуюся плоскость, переходят в сужающиеся участки ручьев, затем, лежа на боку, выстраиваются одна за одной и упираются рылом в подпружиненную планку (заслонку). В этом положении рыбы частично ориентированы. Внизу под заслонкой вращается диск с одной иглой. Игла, накалывая рыбу, протаскивает ее под заслонкой, и рыба конвейером, состоящим из двух ремней, подводится к узлу ориентирования рыбы спинкой вверх. Этот узел состоит из вращающегося валика. С основанием валика жестко связан диск. Диск и валик, вращаясь, помогают рыбе двигаться вправо. При движении рыба вертикальной подпружиненной планкой прижимается к валику и разворачивается в вертикальное положение спинкой вверх. Производится полное ориентирование рыбы, которая затем переводится в разделочную машину.
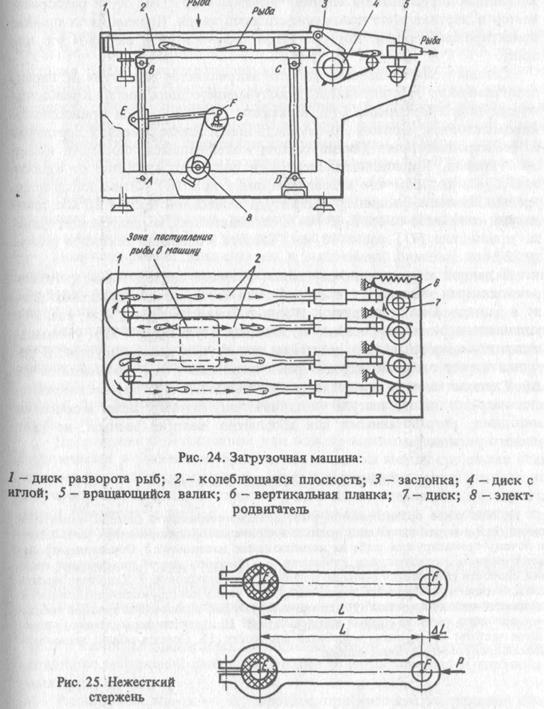
Секция колеблющейся плоскости закрепляется на шатуне ВСпарал-лелограммного механизма ABCD, получающего движение от кривошип-но-шатунного механизма GFE. Механизм GFEA является кривошипно-коромысловым, Привод его осуществляется клиноременной передачей от электродвигателя. Каждая секция колеблющейся плоскости имеет свой привод. Кривошипы-эксцентрики получают вращение от одного вала G, на котором они закреплены под углом 180°, Этим достигается уравновешивание машины. Амплитуда колебаний секции 20 мм, амплитуда колебаний точки Е 10 мм и, следовательно, эксцентриситет (длина кривошипа FG) равен 10 мм. Частота колебаний секций в минуту 320.
В данной конструкции студентам впервые приходится встретиться с нежесткими звеньями, т. е. со звеньями, которые изменяют свою длину в зависимости от нагрузки. В кинематической паре Е (см. рис. 24) установлена резиновая, плотно посаженная втулка (рис. 25), уменьшающая шум машины. Под действием сил втулка деформируется. В результате расстояние между центрами шарниров Е и F уменьшается на  . Следовательно, и длина шатуна уменьшается. При другом направлении нагрузок длина шатуна увеличивается. Поэтому расчет механизма методами, разработанными для абсолютно жестких звеньев, не дает точного результата.
. Следовательно, и длина шатуна уменьшается. При другом направлении нагрузок длина шатуна увеличивается. Поэтому расчет механизма методами, разработанными для абсолютно жестких звеньев, не дает точного результата.








