 2015-07-14
2015-07-14 4673
4673Целью кинетостатического анализа является определение величины уравновешивающей силы (уравновешивающего момента) при заданных силах полезного сопротивления, а такие реакций во всех кинематических парах. В отдельных случаях, когда задана движущая сила (момент), в результате анализа определяется сила полезного сопротивления.
Кинетостатическому анализу должен предшествовать структурный и кинематический анализ механизма. При кинетостатическом анализе не учитываются динамические нагрузки, возникающие в процессе работы механизма. (Для некоторого упрощения мы не будем также учитывать силы трения в кинематических парах).
. Анализ основан на использовании принципа Д'Аламбера, согласно которому, если к действующим на точки материальной системы заданным активным силам и силам реакции связей присоединить силы инерции, то полученная система сил будет находиться в равновесии. Принцип Д'Аламбера позволяет решать динамические задачи методами статики.
Анализ производится для каждой структурной группы в последовательности обратной формуле строения механизма, т.е. начиная со структурной группы наиболее удаленной от входного звена.
Кинетостатический анализ может проводится графоаналитически (метод планов сил) или аналитически.
Вопросы для самоконтроля:
1. Что является целью кинетостатического анализа?
2. Какой принцип теоретической механика лежит в основе кинетостатического анализа?
3. В какой последовательности проводится кинетостатический анализ механизма?
4. Почему кинетостатическому анализу должны предшествовать структурный и кинематический анализ механизма?
5.3 Кинетостатический анализ механизма методом планов сил
План механизма (структурной группы), на котором показаны все приложенные к звеньям механизма (группы) в соответствующих точках силы, называется планом нагрузок (рис.5.2).
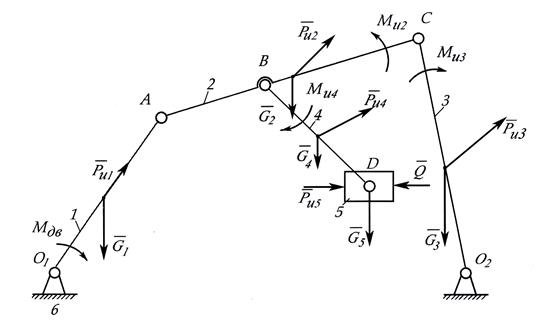
Рис.5.2
Формула строения механизма:

Длины звеньев l OA, l AC, l AB, l CO1, l BD и массы звеньев заданы. Кинематические параметры получены при проведении кинематического анализа. Задана сила полезного сопротивления Q, приложенная к звену 5.
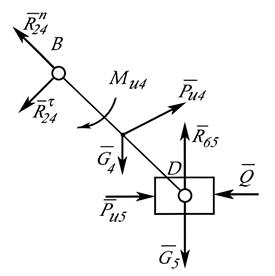
Строим план нагрузок группы II2 (4,5) как наиболее удаленной от входного звена (рис.5.3 а). Действие отброшенных связей заменяем опорными реакциями. При этом реакцию во вращательной кинематической паре В заменяем двумя составляющими: Rn24 – направленную вдоль звена 4 и Rτ24 – направленную перпендикулярно звену. (Цифровые индексы соответствуют номерам соединяющихся в этой кинематической паре звеньев.) Реакцию в поступательной кинематической паре D (R65) направляем перпендикулярно направляющей.
Под действием данной системы сил группа находится в равновесии. Группу Ассура рассматриваем как сочленение двух тел (звеньев 4 и 5 во вращательной кинематической паре D).
Условия равновесия:
 (5.1)
(5.1)
 (5.2)
(5.2)
а) б)
Рис.5.3
из (5.2)

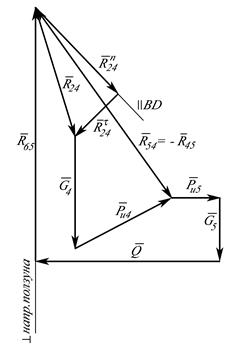
В векторном уравнении (5.1) остается 2 неизвестных. Его решаем графически, путем построения плана сил (рис.5.3 б).
Задаемся длиной отрезка, которым будем изображать вектор какой то известной силы (например Rτ24), и определим масштаб плана сил
kp =Rτ24 / lRτ24 [н/мм]
В любой последовательности (желательно начать с вектора Rτ) откладываются в выбранном масштабе векторы всех известных сил, действующих на звено 4, затем векторы всех известных сил, действующих на звено 5. Через начало первого и конец последнего векторов известных сил проводим линии действия неизвестных сил до их пересечения. Поскольку (5.1) представляет векторную сумму, то конец одного вектора является началом следующего вектора. Этим определяется направление стрелок векторов неизвестных сил. Измерив на плане сил длины неизвестных векторов, находим искомые силы
R n24 = kp*lRn24; R 65 = kp*lR65
Полную реакцию в кинематической паре В R 24 найдем соединив начало вектора R n24 и конец вектора Rτ24
R 24 = kp * lR24
Для нахождения реакции во вращательной кинематической паре D (шатун 4 – ползун 5) расчленим группу, заменив действиезвена 4 на звено 5 реакцией R 45 (соответственно, действие звена 5 на звено 4 реакцией R 54). Запишем условия равновесия звена 5:
`G5 + `Pи5 + `R45 +`Q + `R 65 = 0
Вектор R 45 может быть найден из плана сил как вектор, замыкающий многоугольник сил, действующих на звено 5 (вектор R 54 – как вектор, замыкающий многоугольник сил, действующих на звено 4).
`R 45 = - `R 54 = kp* lR45.
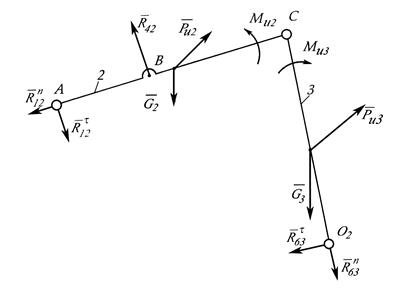
Переходим к группеII1(2,3). Строим план нагружения группы (рис.5.4 а)
В точке В звена 2 прикладываем силу действия четвертого звена на второе
Условия равновесия:
 (5.3)
(5.3)  (5.4)
(5.4)
 (5.5)
(5.5)
из (5.4)

из (5.5)

а)

б)
Рис.5.4.
Для нахождения  строим план сил (рис.5.4б). Методика построения плана сил аналогична описанной выше.
строим план сил (рис.5.4б). Методика построения плана сил аналогична описанной выше.
С учетом масштаба плана сил определяем ` R n12, ` R 12, ` R n63, ` R 63. `Для нахождения реакции во вращательной кинематической паре С (R32) поступаем аналогично описанному для нахождения R45.
`R 32 = - ` R 23 = kp× l×R32
Масштаб для построения каждого плана сил может отличаться от предыдущего.
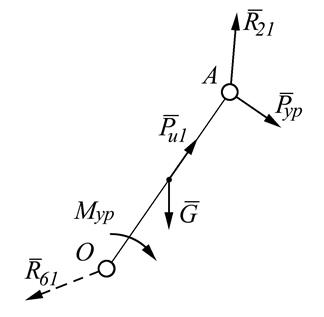
Кинетостатика входного звена.
В кинематической паре А прикладываем силу взаимодействия второго звена с первым
` R21 = -` R12
В кинематической паре О прикладываем силу взаимодействия шестого звена с первым R61. Этот вектор может быть направлен на плане нагружения (рис.5.5а) произвольно, так как его направление определится при построении плана сил.
а) б)
Рис.5.5
Условия равновесия:
 (5.6)
(5.6)
 (5.7)
(5.7)
из (5.7)

Считая, что уравновешивающая сила (если иное не оговорено) Pур приложена в точке А, находим эту силу
Pур = Мур / lOA
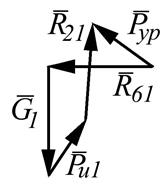
R 61 находим из плана сил (рис.5.5.б).
Вопросы для самоконтроля:
1. Что называется планом нагрузок механизма (структурной группы)?
2. Чем заменяется действие отброшенных связей при построении плана нагрузок структурной группы?
3. Какие необходимо записать уравнения равновесия для группы Ассура 11 класса 1 вида?
4. Какие необходимо записать уравнения равновесия для группы Ассура 11 класса 2 вида?
5. В какой последовательности строятся векторы при построении плана сил?
6. Как определить величину и направление вектора неизвестной силы?
7. Как определить реакцию в кинематической паре шатун – коромысло (шатун – ползун)?
8. Как определяется величина уравновешивающего момента?
9. Как определяется величина уравновешивающей силы?

