 2015-07-14
2015-07-14 1572
1572Определим силы, действующие на звенья механизма
Масса звеньев:


где q- погонная масса звена в виде стержня.
Силы тяжести звеньев:



Силы инерции масс звеньев и их проекции на координатные оси:
Направляющие косинусы (косинусы углов между положительным направлением оси х и направлением векторов  и
и  ):
):
Моменты сил инерции масс шатуна и коромысла:

Для определения реакции в кинематических парах В, С, D рассмотрим план нагружения и условия равновесия структурной группы 2-3 (шатун - коромысло) (рис.5.8).
Уравнения равновесия группы 2-3:




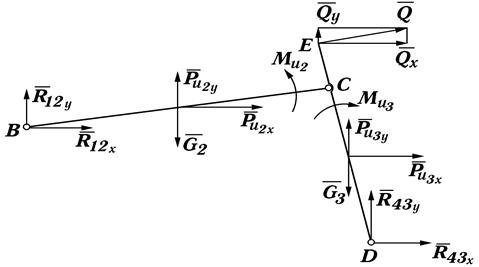
Рис.5.8






Записанные уравнения представляют систему четырех линейных уравнений с четырьмя неизвестными и могут быть представлены в виде:
 , (5.11)
, (5.11)
где:
























Решение системы (5.11) может быть получено в виде:




 ;
;  ;
;
 ;
;  ;
;
 .
.
При этом следует учитывать, что сила полезного сопротивления действует только во время рабочего хода, то есть при 
Реакция в кинематической паре В (кривошип – шатун):
Реакция в кинематической паре D (коромысло – стойка):
Определим реакцию в кинематической паре С (шатун – коромысло):


Для определения реакции в кинематической паре А, а также уравновешивающей силы  (уравновешивающего момента Мур) рассмотрим план нагружения и условия равновесия входного звена (кривошип) (рис. 5.9).
(уравновешивающего момента Мур) рассмотрим план нагружения и условия равновесия входного звена (кривошип) (рис. 5.9).
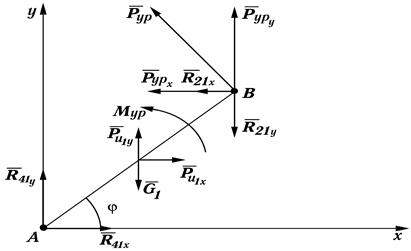
Рис.5.9
Уравнения равновесия входного звена:




Уравновешивающий момент, определенный из условий равновесия:


Реакция в кинематической паре А (стойка – кривошип):


Определение уравновешивающего момента методом профессора Жуковского Н.Е:

откуда
 (5.12)
(5.12)
где: w1 – угловая скорость кривошипа;
Mij; Pij – моменты сил и силы приложения к i -му звену;
vij – скорость точки приложения ij силы;
wi – угловая скорость i -того звена;
bij – угол между векторами ij -ой силы и скорости точки ее приложения.
Второе слагаемое удобно представить в виде суммы произведений проекций сил и скоростей точек их приложения на координатные оси.
Тогда:  Погрешность определения уравновешивающего момента из условий равновесия и методом профессора Жуковского Н.Е.:
Погрешность определения уравновешивающего момента из условий равновесия и методом профессора Жуковского Н.Е.:
Для реализации изложенных выше алгоритмов кинетостатического анализа кривошипно-ползунного и кривошипно-коромыслового механизма разработаны программы расчета на ЭВМ. Программы позволяют производить расчет силовых параметров механизма для n положений механизма.
Вопросы для самоконтроля:
1.Как направляются реакции связей при аналитическом методе кинетостатического анализа?
2.В чем отличие записи условий равновесия при графоаналитическом и аналитическом методах анализа?








