 2015-07-14
2015-07-14 2131
2131Метод основан на принципе Д'Аламбера-Лагранжа: " Если к действующим на точки материальной системы активным силам присоединить силы инерции, то при движении механической системы с идеальными связями сумма элементарных работ активных сил и сил инерции на любом возможном перемещении равна нулю " .
Работа приведенной силы
 (8.23)
(8.23)
где d S np - перемещение под действием Р пp.
a np - угол между вектором силы и вектором перемещения.
Работа сил, приложенных к звеньям:
 (8.24)
(8.24)
 (8.25)
(8.25)
Подставляя (8.23) и (8.24) в (8.25), получим
 (8.26)
(8.26)
Для механизма с одной степенью свободы 
Отсюда
 (8.27)
(8.27)
Согласно (8.27) рассматривается равновесие моментов всех сил относительно полюса плана скоростей.
Для нахождения Р У = Р пр необходимо
- построить повернутый план скоростей механизма;
- найти на этом плане по правилу подобия точки приложения заданных внешних сил;
- в одноименные точки плана перенести параллельно самим себе силы с механизма, включая и уравновешивающую силу;
- принять повернутый план скоростей за рычаг с точкой опоры в полюсе р, написать уравнение равновесия этого рычага и из него найти величину уравновешивающей силы Ру.
Необходимо указать, что если к звеньям механизма приложен внешний момент, то его следует представить в виде пары сил, которые и надо переносить в соответствующие точки повернутого плана скоростей. Рычагом Жуковского непосредственно находится уравновешивающая сила. Уравновешивающий момент можно найти умножением уравновешивающей силы на ее плечо относительна оси звена, к которому она приложена.
Вышесказанное рассмотрим на примере кривошипно-ползунного механизма.
Для кривошипно-ползунного механизма (рис. 8.6,а) найти величину уравновешивающей силы Ру, приложенной к оси шарнира В перпендикулярно к направлению АВ, а также уравновешивающий момент Mу, приложенный к звену 1. Рассмотреть случай, когда угол j1 = 45O.
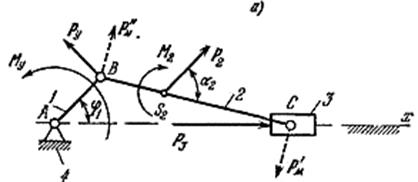
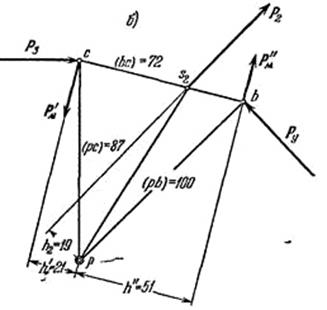
Рис.8.6
Нагрузка звеньев: к звену 3 приложена приведенная сила Р3 ; к звену 2 приложены приведенная сила Р2, направленная под углом a2 = 60° к линии BС, и момент M 2.
Размеры звеньев: lAB, lBC, l BS2.
- Строим схему механизма (рис. 8.6, a) в масштабе ml, м/мм.
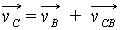
- Строим повернутый план скоростей (рис. 8.6б) по уравнению
По правилу подобия находим на плане точку s2 приложения силы Р2.
- Со схемы механизма переносим на план скоростей параллельно самим себе силы в одноименные точки плана.
Предварительно момент М2 представляем в виде пары сил Р”M и Р’M, приложенных в точках В и С, с плечом пары, равным lBC; модуль этих сил будет равен

- На плане скоростей (рис. 8.6, б) находим плечи h 2, h ’, h ” сил, перенесенных на него, относительно полюса р.
- Составляем уравнение моментов сил, перенесенных на план скоростей, относительно его полюса р:


отсюда находим величину уравновешивающей силы:

так как согласно рис. 8.6, б h' + h" = (Ьс).
- Необходимый уравновешивающий момент будет равен
Этот способ удобен для определения уравновешивающей силы, т.к. достаточно иметь только план скоростей и одно уравнение. Расхождение при определении Р У из условий равновесия и методом рычага Жуковского не должно превышать 3¸ 5 %. Однако этот метод не позволяет определить реакции в кинематических парах.
Вопросы для самоконтроля:
1.На каком принципе теоретической механики основан метод профессора Жуковского Н.Е.?
2.В чем суть метода проф. Жуковского Н.Е.?
3.Что определяется методом профессора Жуковского Н.Е.?

