 2015-07-14
2015-07-14 760
760В качестве примера рассмотрим движение поршневого двигателя (например, горизонтальной паровой машины), когда он отдает свою работу через ременный привод при условии, что разность натяжения ветвей Z2 – Z1 = const (рис.8.8).
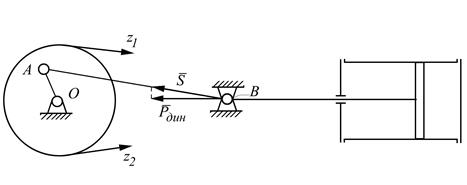
Рис.8.8
На основании анализа цикла работы паровой машины и влияния инерционных сил получен график изменения силы Р дин (рис.8.9).
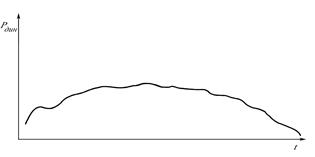

рис 8.9
Теперь необходимо выяснить в какой мере Р дин будет передаваться на палец кривошипа А. Разложим Р дин на силу S по направлению шатуна и силу N, направленную ^ к направляющим.
Сила S передается на кривошип A. Перенесем ее в т. A и разложимпо направлению ^ кривошипу и по кривошипу (рис.8.10).
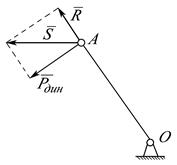
Рис.8.10
В соответствии с законом передачи сил касательная движущая сила
 (8.36)
(8.36)
т.к. u BA = 0 в мертвых положениях, значит и Т дин = 0. Если вычислить значения Т дин для всех положений кривошипа, то график будет выглядеть так (рис.8.11):
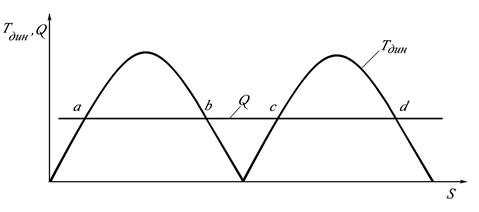
Рис.8.11
Теперь главный вал машиныможно считать находящимся подвоздействием касательной силы Т дин, приложенной в А, и сил натяжения ремней Z 1 и Z 2, приложенных к ободу маховика (рис.8.12).
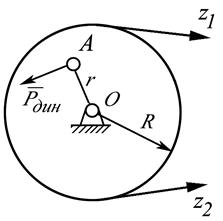
Рис.8.12
Запишем дифференциальное уравнение вращения маховика, рассматривая его как твердое тело, вращающееся вокруг неподвижной оси О (второе слагаемое равно нулю, т.к.
Jп = const)
 (8.37)
(8.37)
где
Jn - приведенныймомент инерции твердого тела (маховика, кривошипа, вала и массы m 2a от шатуна),
en - угловое ускорение звена приведения
S М -сумма моментов внешних сил относительно оси вращения.
 (8.38)
(8.38)
Отношение М ПС / r обозначим Q - силой полезного сопротивления, приведенной к пальцу кривошипа.
Тогда  . (8.39)
. (8.39)
Теперь можно рассматривать маховик под действием двух сил Т дин и Q (рис.8.13)
Дифференциальное уравнение вращения маховика
 (8.40)
(8.40)
или
 (8.41)
(8.41)
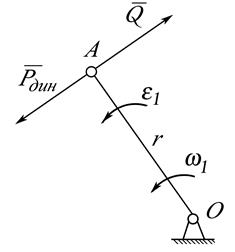
Рис.8.13
Т.к.мы условились, что Z 1 = Z 2 = const, то М ПС = const, следовательно Q = const.
Анализ графика Т дин - Q ( функция S a ) показывает, что Т дин = Q только в четырех точках за оборот. Значит в этих точках en = 0 и wn = const.
В остальных случаях угловая скорость либо возрастает (когда (Т дин - Q) > 0, e > 0) или убывает ((Т дин - Q) < 0, e < 0). Волны угловой скорости будут тем меньше, чем меньше en, а следовательно тем большим должен быть Jn - момент инерции 1-го звена.
Выведем условие необходимое для того, чтобы, несмотря на неизбежное колебание угловой скорости в период оборота, угловая скорость после оборота возвращалась к своему первоначальному значению, т.е.
w0 = w2p = w4p = × × ×
Тогда будем иметь установившееся периодически неравновесное движение.
 Умножим обе части дифференциального уравнения (8.40) вращениямаховика на элемент пути т. А
Умножим обе части дифференциального уравнения (8.40) вращениямаховика на элемент пути т. А
 (8.42)
(8.42)
принимаяво внимание,что, получим
 (8.43)
(8.43)
Интегрируя (8.43) в пределах оборота, получим
 (8.44)
(8.44)
т.к. w0 = w2p, то условием установившегося движения будет:
 (8.45)
(8.45)
Т.к. Q = const, то
 (8.46)
(8.46)
 (8.47)
(8.47)
Выражение (8.47) устанавливает зависимость между движущей силой и силой полезного сопротивления, обеспечивающую режим установившегося неравновесного движения.
Подбор величины Q по величине движущей силы или регулирование движущей силы в соответствии с Q производится регулятором.
Однако мы не устранили колебания угловой скорости внутри оборота.
Определим среднюю угловую скорость звена приведения

где Тоб – время одного оборота звена приведения.
За меру неравномерности вращения примем отношение
 , (8.48)
, (8.48)
которое называют коэффициентом неравномерности вращения главного вала машины.
Определение Тоб сложно, поэтому принимают
 (8.49)
(8.49)
Используя выражения (8.48) и (8.49), получим:
 (8.50)
(8.50)
Установим связь между моментом инерции маховика J n и коэффициентом неравномерности вращения δ. Для этого проинтегрируем дифференциальное уравнение движения на участках между точками а и в графика Тдин (рис.8.11).Получим
Тb – Ta =A(a-b)(Tдин) – A(a-b)(Q) = Aизб.max (8.51)
или
(JПω2max - JПω2min)/ 2 = Aизб.max (8.52)
ω2max - ω2min = (ωmax - ωmin)(ωmax + ωmin) =
[ (ωmax + ωmin) / 2] × [(ωmax - ωmin) / ωср] 2ωср = 2ωср2 δ (8.53)
Преобразуем (8.51) с учетом (8.52) и (8.53):
Jnωср2 δ = Aизб max (8.54)
Отсюда
δ = Aизб max / Jnωср2 (8.55)
Обычно при проектировании машины задаются приемлемым коэффициентом δ и решают уравнение относительно Jn:
Jn = Aизб max / ωср2 δ (8.56)
(Для поршневых двигателей δ = 1/40 ¸ 1/100; для электрогенераторов и двигателей δ = 1/300).
Найдя Jn, рассчитывают вес обода маховика.
J n = Jмахов+ Jкр+ Jгл.в.+ m2ar2 (8.57)
Первое слагаемое несоизмеримо больше последующих, поэтому условно можно принять
Jn = Jмахов
Используя формулу момента инерции для тонкого кольца, получим
Jмахов = 1,1R2Gоб /g Gоб = 0,9 g Jмахов / R2
(обычно принимают R = 5r; Aизб max = 0,2 Аэф.; Аэф=Nэф.Тоб;).
Вопросы для самоконтроля:
1. Назовите наиболее типичные условия работы машины.
2. При каких условиях (режимах) работы машины необходимо регулирование скорости движения?
3. Почему при крайних (мертвых) положениях ползуна Тдин=0?
4. Запишите дифференциальное уравнение вращения маховика.
5. Приведите зависимость между движущей силой и силой полезного сопротивления, обеспечивающую режим установившегося неравновесного движения.
6. Что называется коэффициентом неравномерности вращения?
7. Как связаны приведенный момент инерции звена приведения и коэффициент неравномерности вращения?
8. Как определить вес обода маховика?








