 2015-07-14
2015-07-14 2000
2000Для устойчивой работы двигателя важно, чтобы автоматически устанавливалось равновесие вращающего и тормозного моментов; с увеличением нагрузки на валу двигателя должен соответственно возрастать и вращающий момент. Это уравновешивание у работающего асинхронного двигателя осуществляется следующим образом: при увеличении нагрузки на валу тормозной момент оказывается больше вращающего момента, вследствие чего частота вращения ротора уменьшается — скольжение возрастает. Повышение скольжения вызывает увеличение вращающего момента, и равновесие моментов восстанавливается при возросшем скольжении.
Однако зависимость вращающего момента от скольжения довольно сложна.
Действительно, в уравнении вращающего момента (14.27) все три величины I2, Фв и cos ф зависят от скольжения.
Ток ротора I2 (см. § 14.7) с возрастанием скольжения быстро увеличивается вследствие увеличения ЭДС E2, пропорциональной скольжению. Сначала, пока индуктивное сопротивление рассеяния обмотки ротора s  Lpac2 мало по сравнению с ее активным сопротивлением rв2, значение тока при увеличении скольжения возрастает быстро, а затем, когда s Lpac2 = rв2, все медленнее.
Lpac2 мало по сравнению с ее активным сопротивлением rв2, значение тока при увеличении скольжения возрастает быстро, а затем, когда s Lpac2 = rв2, все медленнее.
Коэффициент мощности цепи ротора
cos ф2 = rs2/ 
вследствие возрастания скольжения уменьшается сначала медленно, а потом все быстрее. Полезно пояснить физические условия, определяющие влияние cos ф2 на вращающий момент.
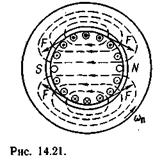
Для этого достаточно обратиться к крайним идеальным условиям — предположить, что cos ф2 = 0, т. е. принять, что обмотка ротора обладает только индуктивным сопротивлением. В таких условиях токи в обмотке ротора будут иметь наибольшее значение в тех проводниках ротора, в месте расположения которых индукция была максимальной четверть периода тому назад (рис. 14.21). Ток будет иметь максимальное значение там, где индукция вращающегося магнитного поля отсутствует, а силы, действующие на остальные провода ротора, будут взаимно уравновешиваться и вращающий момент на валу двигателя будет равен нулю.
В реальных условиях асинхронного двигателя цепь ротора обладает как активным, так и индуктивным сопротивлением, причем последнее изменяется пропорционально скольжению, что соответственно сказывается на вращающем моменте машины.
Влияние скольжения сказывается и на главном потоке машины ФB хотя и в меньшей мере. С увеличением скольжения возрастает ток I; статора, а следовательно, уменьшается ЭДС
 1 =
1 =  1 — Zo61I1
1 — Zo61I1
и пропорциональный ей магнитный поток Фв, так как (14.10)
Фв = E1/4,44fkо61.
В выражении момента (14.27) три величины зависят от скольжения, причем одна из них I2 увеличивается с ростом скольжения, а две другие — Фв и cos ф2 убывают. Следовательно, определенному значению скольжения, называемому критическим скольжением skp, должно соответствовать максимальное значение вращающего момента. Чтобы определить условия максимума момента на валу через параметры машины, обратимся к выражению момента (14.25), в котором I2 определим из схемы замещения фазы статора (рис. 14.19) без учета тока холостого хода I1х:
Mвр= 
 (14.28)
(14.28)
Возьмем первую производную от выражения вращающего момента (14.28) по скольжению и приравняем ее нулю:
| (14.29) |
 =
=  U
U  r’B2
r’B2 
Нулю может быть равен только числитель этого выражения, следовательно, критическое скольжение, соответствующее максимуму момента, будет:
здесь знак минус относится к работе машины в режиме генератора. Так как у машин значение r2в1 составляет не более 5 % значения подкоренного выражения, то можно этой величиной пренебречь и считать, что критическое скольжение, выраженное через приведенные параметры цепи ротора, будет:
sKp = ±r'B2/(xpac,1 + x'pac2). (14.30)
Если заменим r'B2 = krB2; x'pac2 = kxpacc2; xpacl/k = x”pacl, то получим выражение sKp через роторные сопротивления rв2, xрас2 и xpacl - индуктивное сопротивление рассеяния фазной обмотки статора, приведенное к числу фаз, витков и обмоточному коэффициенту ротора:
sKp = ±rB2/(x”pacl+xpac2). (14.31)
 |
Индуктивность рассеяния обмоток ротора относительно велика, так как проводники лежат в пазах сердечника; поэтому максимальный момент двигателя обычно соответствует весьма небольшим скольжениям, а именно 4 % у двигателей большой мощности и до 14 % у двигателей малой мощности.
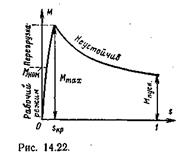
Характерный график зависимости вращающего момент двигателя от скольжения показан на рис. 14.22. Максимум вращающего момента разделяет график вращающего момента на устойчивую часть от s = 0 до sKp и неустойчивую часть — от sKp до s = 1, в пределах которой вращающий момент уменьшается с ростом скольжения.
У работающего двигателя динамическое равновесие моментов автоматически восстанавливается при увеличении скольжения, пока тормозной момент на валу меньше максимального момента двигателя. Но когда тормозной момент достиг значения максимального момента двигателя, тогда при дальнейшем увеличении нагрузки возрастание скольжения будет лишь уменьшать вращающий момент: таким образом, динамическое равновесие, нарушенное увеличением нагрузки, не восстанавливается и вследствие преобладания тормозного момента двигатель останавливается.
Выразим теперь максимальный вращающий момент через параметры машины; для этого подставим выражение критического скольжения (14.30) в уравнение момента (14.28).
Пренебрегая значением величины лв1 по сравнению со значением величины (храс1 + х'расг), получим выражение максимального момента асинхронного двигателя в следующей простой форме:
(14.32)
Mmax= 
 .
.
Максимальный момент определяет перегрузочную способность асинхронного двигателя. Выражение (14.32) показывает, что Мтах не зависит от активного сопротивления цепи ротора, в то же время согласно (14.30) и (14.31) критическое скольжение пропорционально этому сопротивлению. Следовательно, можно, увеличивая активное сопротивление цепи ротора, увеличивать критическое скольжение, не изменяя максимальный момент. Это используется для улучшения пусковых условий в двигателях с фазным ротором.
 То обстоятельство, что максимальный вращающий момент пропорционален U21, делает асинхронный двигатель весьма чувствительным к снижению напряжения питающей его сети. При значительном снижении U1 вращение двигателя при пуске в ход может не начаться.
То обстоятельство, что максимальный вращающий момент пропорционален U21, делает асинхронный двигатель весьма чувствительным к снижению напряжения питающей его сети. При значительном снижении U1 вращение двигателя при пуске в ход может не начаться.
У нормальных асинхронных двигателей максимальный момент больше номинального в 2—2,5 раза.
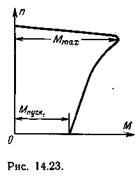
Для целей электропривода большое значение имеет зависимость частоты вращения двигателя от нагрузки на валу п (М); эта зависимость носит название механической характеристики. По своей форме она отличается от кривой Мвр (s) только положением по отношению к координатным осям.
Как показывает кривая рис. 14.23, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении вращающего момента в пределах от нуля до максимального значения, т. е. механическая характеристика двигателя в этом случае жесткая.
При перегрузке свыше максимального момента Мтах (что составляет примерно двух-, трехкратную перегрузку) двигатель входит в область неустойчивого режима (если тормозной момент на валу постоянен) и останавливается. Это обстоятельство вынуждает выбирать мощность двигателя так, чтобы даже при кратковременной перегрузке не был превышен максимальный момент; в противном случае привод должен быть снабжен соответствующим маховиком.
Механическая характеристика, относящаяся к нормальным рабочим условиям машины, называется естественной механической характеристикой в отличие от искусственной механической характеристики, какой является, например, характеристика двигателя с фазным ротором, когда в цепь ротора включен реостат.

