 2015-08-21
2015-08-21 2960
2960Результатом тягового расчета является определение скоростей и времени движения машины на различных участках трассы при известном уклоне или выбор уклона соответствующего участка; определение тормозного пути, пропускной способности выработки [5].
Суммарное сопротивление движению
 ,
,
где g – ускорение свободного падения, м/с; Р – фактическая грузоподъемность транспортной машины, т; Р 0 – масса машины; w 0 –удельное сопротивление движению, Н/кН; w к – удельное дополнительное сопротивление движению от кривизны трассы, w к = = (0,05-0,08) w 0; i – уклон дороги, ‰; d – коэффициент, учитывающий инерцию вращающихся масс машин (для машин с двигателем внутреннего сгорания d = 1,10, для машин с электроприводом d = 2¸2,25); а – ускорение движения, м/с2; W в – сопротивление воздуха, Н.
В подземных условиях по сравнению с условиями работы машины на поверхности сопротивление воздуха увеличивается в 1,5 раза:
 ,
,
где r – аэродинамический коэффициент обтекания, r = 0,08¸0,10; W – площадь лобовой поверхности машины, м2; v – скорость движения, км/ч.
Скорость движения принимается по динамической характеристике машины, но не более 20 км/ч. На прямолинейных участках горизонтальной выработки длиной более 500 м допускается увеличение скорости до 40 км/ч. Для самоходных вагонов с электроприводом максимальная скорость с грузом 7 км/ч, порожняком 8 км/ч [7].
В зависимости от типа дорожного покрытия (щебеночное, песчаное влажное, грунтовое укатанное, рудная залежь, бокситовая руда, бетонное, асфальтовое, бетонное или асфальтовое с загрязнением) удельное сопротивление движению (w 0) меняется от 10-15 до 90-210 Н/кН, а коэффициент сцепления колес с покрытием (j) колеблется от 0,6 до 0,7 (сухое покрытие) и от 0,25 до 0,6 (влажное покрытие).
Сила тяги, развиваемая машиной на ободе колеса,
 ,
,
где N дв – суммарная мощность ходовых двигателей, кВт; hп – КПД передачи от вала двигателя до ведущих колес, hп = 0,80¸0,93; hк – КПД ведущего колеса, hп = 0,7¸0,9; hо.м – коэффициент отбора мощности для бортовых систем.
Сила тяги, развиваемая машиной по условиям сцепления ведущих колес с почвой выработки (в ньютонах),
F сц = 1000 Р сцj,
где Р сц – сцепной вес машины, кН.
Для подземных автосамосвалов и вагонов с телескопическим кузовом
Р сц = 0,7(Р + P 0) g.
Для электрических самоходных вагонов со всеми ведущими колесами
Р сц = (Р + P 0) g.
Для двухосных электрических самоходных вагонов с одной ведущей осью
 .
.
Для обеспечения движения машины в режиме тяги должно быть соблюдено условие, при котором  .
.
Уклоны дороги при выбранных скоростях движения определяются с использованием так называемого динамического фактора (силы тяги, отнесенной к общему весу машины). Динамический фактор
D = w 0 + w к ± i ± j,
где j – относительное ускорение, j = 1000d(a / g).
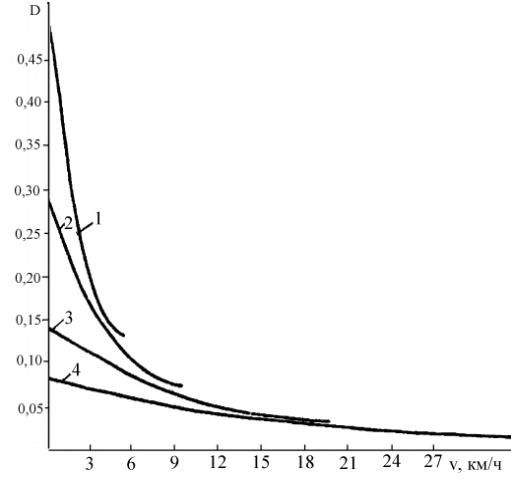
Рис.59. Динамическая характеристика автомобиля-самосвала МоАЗ-6401-9585 1-4 – номера передач |
Зависимость динамического фактора от скорости движения называется динамической характеристикой (рис.59). Для определения скорости движения строят расчетный профиль, на котором указывают длину и уклон каждого элемента пути. Затем определяют соответствующее каждому элементу значение динамического фактора D = w 0 ± i. Если w 0 = 40 Н/кН, уклон i = 150 ‰ или i = 0,15 (в относительных единицах), то удельное сопротивление от уклона 150 Н/кН.
По известному значению D для каждого элемента профиля пути определяется скорость движения автосамосвала на этом элементе. Для этого откладывают значение D по оси ординат (рис.59), проводят горизонтальную линию до пересечения с кривой и проецируют точку пересечения на ось абсцисс.
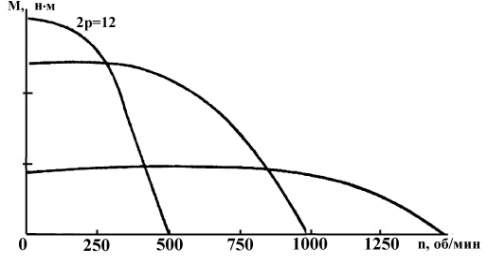
Рис.60. Механические характеристики ходовых электродвигателей АВТ-15-4/6/12, установленных на вагонах 5ВС15 (р – число пар полюсов) |
Для самоходных вагонов с электроприводом обычно задают механическую характеристику ходового электродвигателя как зависимость крутящего момента на валу электродвигателя до частоты его вращения (рис.60).
Скорость движения вагона
 ,
,
где n – частота вращения ходовых электродвигателей, об/мин; i p– передаточное отношение редукторов; r к – кинематический радиус колеса, м.
Соответствующий скорости динамический фактор при движении по прямой
 ,
,
где а – число ходовых электродвигателей; М – крутящий момент одного электродвигателя, Н·м; r д – динамический радиус колеса, м; hп – КПД передачи от вала электродвигателя к оси колеса.
При произвольной загрузке машины (Р) фактическое значение динамического фактора приводится к значению динамического фактора, указанного в динамических характеристиках,
 ,
,
где Р ном – номинальная загрузка машины, т.
При равномерном движении
 .
.
Если задан тип дорожного покрытия (w 0) и уклон дороги, то вычисляют динамический фактор и определяют скорость движения по динамической характеристике. При известной скорости движения и типе дорожного покрытия вначале находят по характеристике динамический фактор, затем вычисляют уклон дороги:
 .
.
Кроме того, в подземных условиях максимальный уклон i mах принимается равным 100 ‰ (6°).
Безопасная скорость на повороте
 ,
,
где R – радиус поворота, м; f сц – коэффициент бокового скольжения, f сц = (0,3¸0,4)j; i в – поперечный уклон виража, i в = 0,02¸0,03.
По характеристике продольного профиля трассы и скорости движения машины на каждом элементе профиля определяется продолжительность движения машины в грузовом и порожнем направлениях:
 ,
,
где li – длина i -го участка трассы, км;  и
и  – скорость движения машины соответственно в грузовом и холостом направлениях на i -м участке, км/ч; k р.з – коэффициент, учитывающий разгон и замедление машины на трассе, k р.з = 1,1¸1,2.
– скорость движения машины соответственно в грузовом и холостом направлениях на i -м участке, км/ч; k р.з – коэффициент, учитывающий разгон и замедление машины на трассе, k р.з = 1,1¸1,2.
В этом случае общее время движения
t дв = t дв.гр + t дв.х.
Тормозной путь машины
 ,
,
где L р – путь, проходимый за время реакции водителя, м, L р = 0,28 v 0 t 0; v 0 – скорость в начале торможения, км/ч; t 0 – время реакции водителя, t 0 = 0,7¸1,0 с; L д – путь, проходимый машиной за время действия тормозов, м.
Когда тормозной вес машины Р т = (Р + Р 0) g,
 .
.
При одной паре тормозных колес
 ,
,
где Р т – тормозной вес, Р т = 0,7(Р + Р 0) g.
Интервал между движущимися машинами
l > (L т + L м),
где L м – габаритная длина машины.
Пропускная способность автотранспортного уклона, тоннеля, штольни, штрека при движении автосамосвалов в одном направлении
 ,
,
где v – расчетная скорость движения, км/ч; k – коэффициент неравномерности движения, k = 1,2¸1,3.








