 2015-08-13
2015-08-13 2791
2791Реализация процессов оптимизации в ручную сложна и трудоёмка. Благодаря пакету программ МВТУ расчёт параметров регуляторов можно провести достаточно быстро с большой точностью.
Для оптимизации моей САУ я использую пропорционально-интегрально-дифференциальный, или ПИД-регулятор.
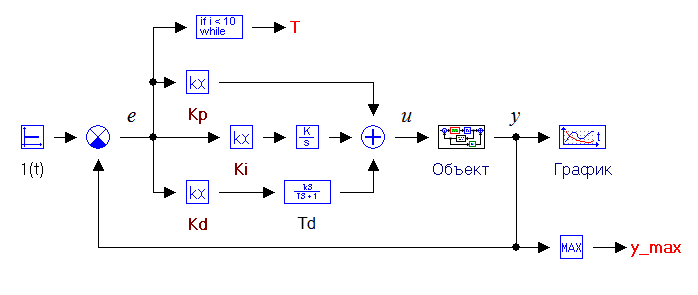
Для этого составим схему представленную на рис. 14 с макроблоком представленным на рис.15
Параметры качества регулирования:
Т – время регулирования.
В блоке программирования описана функция для расчёта времени регулирования:
input e;
if abs(e)>0.05 then T=time;
output T;
y_max – значение максимума переходной функции(перерегулирование)
y’’_max – значение максимума 2 производной переходной функции(максимальное ускорение).
Задаём значения качеств регулирования в параметрах оптимизации
y_max ≤ 1.25;
y’’_max ≥ 2;
 Т ≤ 8,4.
Т ≤ 8,4.
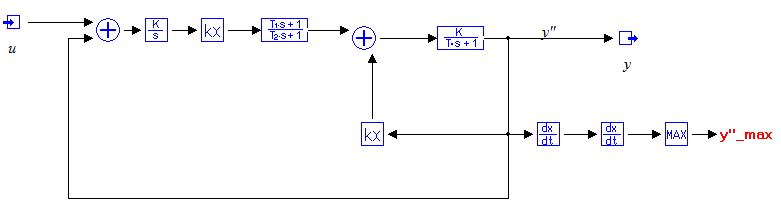 рис. 14 Схема для расчёта параметров ПИД регулятора в МВТУ.
рис. 14 Схема для расчёта параметров ПИД регулятора в МВТУ.
рис. 15 Содержимое макроблока.
В итоге после расчёта параметров ПИД регулятора получим данные представленные на рис.16 и соответствующий график представленный на рис.17.
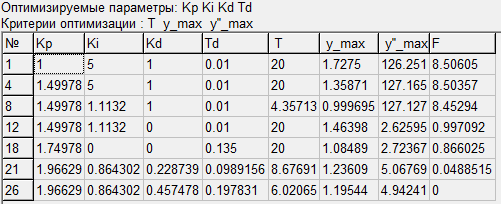
рис.16 Результаты расчёта оптимизации.
Как видно из рис.16 итог оптимизации полностью удовлетворяет заданным параметрам оптимизации. 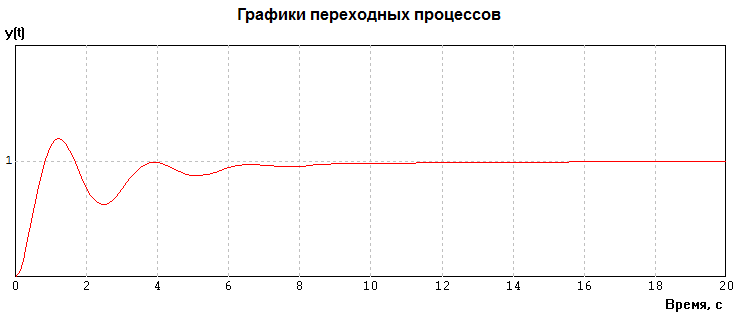
рис.17 Кривая переходного процесса после определения параметров ПИД регулятора.








