 2015-08-21
2015-08-21 919
919| PLOTV | Отображение векторов в виде линий |
Синтаксис:
plotv(P, LineStyle)
Описание:
Функция plotv(P, LineStyle) строит векторы столбцов массива входа Р размера R´Q; строковая переменная LineStyle позволяет задать тип линии согласно следующей таблице.
| Тип линии | Значение LineStyle |
| Непрерывная | '–', по умолчанию |
| Штриховая | '– –' |
| Двойной пунктир | ':' |
| Штрихпунктирная | '–.' |
Число строк R массива Р должно быть не меньше чем 2; при значениях R, больших, чем 2, для построения графика используются только первые 2 строки массива Р.
Пример:
P = [–0.4 0.7 0.2;
–0.5 0.1 0.5];
plotv(P,'–'); % Рис.11.64
Результат построения представлен на рис. 11.64.
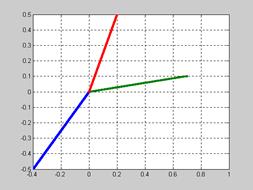 Рис. 11.64
Рис. 11.64
Сопутствующие функции: PLOTVEC.
| PLOTVEC | Отображение векторов входа в виде маркеров |
Синтаксис:
plotvec(P,color,Marker)
plotvec(P)
hh = plotvec(...)
Описание:
Функция plotvec(P, color, Marker) отображает векторы столбцов массива входа Р размера R´Q в виде маркеров, цвет каждого из которых задается элементами вектор-строки color; строковая переменная Marker позволяет задать тип маркера согласно следующей таблице.
| Тип маркера | Значение Marker | Тип маркера | Значение Marker |
| Плюс | '+', по умолчанию | Пятигранник | 'p' |
| Точка | '.' | Шестигранник | 'h' |
| Звездочка | '*' | Стрелка вниз | 'v' |
| Кружок | 'o' | Стрелка вверх | '^' |
| Крест | 'x' | Стрелка влево | '<' |
| Квадрат | 's' | Стрелка вправо | '>' |
| Ромб | 'd' |
Число строк R массива Р должно быть не меньше чем 2; для отображения маркеров используются первые 2 или 3 строки массива Р. Графики строятся либо в двумерном,
либо в трехмерном пространстве соответственно.
Функция plotvec(P) использует тип маркера по умолчанию, а элементы вектор-строки color соответствуют номеру столбца массива Р.
Функция hh = plotvec(...) возвращает вектор дескрипторов для всех маркеров.
Пример:
P =[ 0.1000 1.0000 0.5000 0.7000
–1.0000 2.0000 0.5000 0.1000
1.0000 0.1000 0.7000 0.5000];
t = minmax(P)';
axis(t(:)')
c = [1 2 3 4];
plotvec(P,c,’o’) % Рис.11.65
Результат представлен на рис. 11.65.
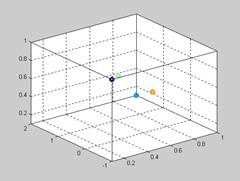 Рис. 11.65
Рис. 11.65
Сопутствующие функции: PLOTV.
| PLOTPV | Отображение векторов входов и целей в виде маркеров |
Синтаксис:
plotpv(P,T)
plotpv(P,T,v)
Описание:
Функция plotpv(P, T) отображает векторы столбцов массива входа Р размера R´Q
и массива целей размера S´Q в виде маркеров различного типа. Число строк этих массивов R и S должно быть не более трех.
Функция plotpv(P, T, v) позволяет задать пределы построения графика:
· для двумерных векторов в виде вектора [x_min x_max y_min y_max];
· для трехмерных векторов в виде вектора [x_min x_max y_min y_max z_min z_max].
Пример:
Определим выходы и цели персептрона:
P = [0 0 1 1;
0 1 0 1;
1 0 0 1];
T = [0 0 0 1];
plotpv(P,T) % Рис.11.66
Результат представлен на рис. 11.66.
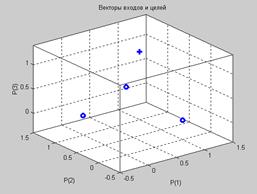 Рис. 11.66
Рис. 11.66
Сопутствующие функции: PLOTPC.
| PLOTPC | Построение разделяющей линии или плоскости в пространстве векторов входа для персептрона |
Синтаксис:
plotpc(W,b)
plotpc(W,b,hh)
h = plotpc(…)
Описание:
Функция plotpc(W, b) строит разделяющую линию или плоскость, если заданы матрица весов W размера S´R и вектор смещений размера S´1, причем значение R должно быть не более трех. Разделяющая линия или плоскость строятся в пространстве векторов входа, координатные оси которого предварительно формируются с помощью функции plotpv.
Функция plotpc(W, b, hh) иcпользует вектор hh дескрипторов графических объектов Line последних построенных линий и удаляет их перед тем, как построить новую разделяющую линию или плоскость.
Функция h = plotpc(...) возвращает вектор дескрипторов вновь созданных графических объектов Line.
Примеры:
Определим векторы входов и целей и отобразим их в двумерном пространстве входов:
P = [0 0 1 1;
0 1 0 1];
T = [0 0 0 1];
plotpv(P,T)
Создадим персептрон со входами P, зададим произвольные значения весам и смещениям и построим разделяющую линию в пространстве входов:
net = newp(minmax(P),1);
net.iw{1,1} = [–1.2 –1];
net.b{1} = 1.3;
plotpc(net.iw{1,1},net.b{1}) % Рис.11.67
На рис. 11.67 построено начальное положение разделяющей линии и требуется выполнить процедуру настройки параметров персептрона, чтобы правильно классифицировать векторы входа.
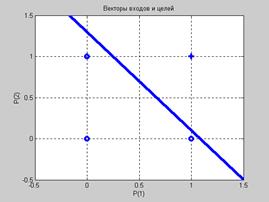 Рис. 11.67
Рис. 11.67
Перейдем к построению разделяющей плоскости в трехмерном пространстве:
P = [0 0 1 1;
0 1 0 1;
1 0 0 1];
T = [0 0 0 1];
plotpv(P,T)
Следующие функции создают персептрон со входами, соответствующими значениям вектора P, назначают значения его весам и смещениям и строят разделяющую плоскость:
net = newp(minmax(P),1);
net.iw{1,1} = [–1.2 –1 –0.5];
net.b{1} = 1.3;
plotpc(net.iw{1,1},net.b{1}) % Рис.11.68
Результат представлен на рис. 11.68.
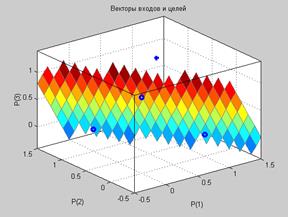 Рис. 11.68
Рис. 11.68
Анализ рис. 11.68 позволяет сделать вывод, что векторы входов и цели в начальном состоянии находятся по разные стороны от плоскости.
Сопутствующие функции: PLOTPV.
| HINTONW | Диаграмма Хинтона для весов |
Синтаксис:
hintonw(W,maxw,minw)
hintonw(W)
Описание:
Функция hintonw(W, maxw, minw) отображает значения элементов матрицы весов W размера S´R в виде диаграммы Хинтона; при этом аргумент maxw соответствует максимальному, а minw – минимальному элементу весовой матрицы. Диаграмма Хинтона – это прямоугольная сетка, в узлах которой изображаются квадраты, площадь которых пропорциональна значению соответствующего веса; цвет квадрата соответствует знаку веса: красный (темный) для отрицательных и зеленый (светлый) для положительных весов.
Функция hintonw(W) использует по умолчанию для аргумента maxw значение max(max(abs(W))), а для аргумента minw значение maxw/100.
Пример:
Зададим случайную матрицу весов и построим для нее диаграмму Хинтона (рис. 11.69), используя значения дополнительных аргументов по умолчанию:
W = rands(4,5)
W =
0.9003 0.7826 0.6428 0.8436 0.8709
–0.5377 0.5242 –0.1106 0.4764 0.8338
0.2137 –0.0871 0.2309 –0.6475 –0.1795
–0.0280 –0.9630 0.5839 –0.1886 0.7873
hintonw(W) % Рис.11.69
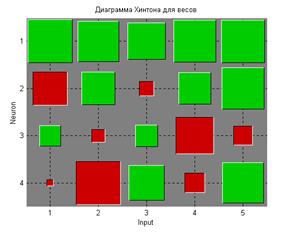 Рис. 11.69
Рис. 11.69
Сопутствующие функции: HINTONWB.
| HINTONWB | Диаграмма Хинтона для весов и смещений |
Синтаксис:
hintonwb(W,b,maxw,minw)
hintonwb(W,b)
Описание:
Функция hintonw(W, b, maxw, minw) отображает значения элементов матрицы весов W размера S´R и вектора смещений размера S´1 в виде диаграммы Хинтона; при этом аргумент maxw соответствует максимальному, а minw – минимальному элементу весовой матрицы. Элементы вектора смещений показаны в левой части диаграммы.
Функция hintonw(W, b) использует по умолчанию для аргумента maxw значение max(max(abs(W))), а для аргумента minw значение maxw/100.
Пример:
Зададим случайные матрицу весов и вектор смещений и построим для них диаграмму Хинтона (рис. 11.70), используя значения дополнительных аргументов по умолчанию:
W = rands(4,5);
b = rands(4,1);
hintonwb(W,b) % Рис.11.70
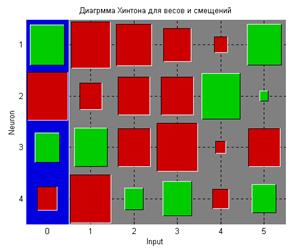 Рис. 11.70
Рис. 11.70
Сопутствующие функции: HINTONW.
| PLOTPERF | График функции качества обучения |
Синтаксис:
plotperf(tr,goal,name,epoch)
plotperf(tr)
Описание:
Функция plotperf(TR, goal, name, epoch) предназначена для построения графиков критерия качества обучения, предельной точности и графиков точности обучения с учетом контрольного и тестового подмножеств. Функция имеет следующие входные аргументы:
TR – массив записей с характеристиками обучения, возвращаемый функцией train;
goal – предельная точность, по умолчанию NaN;
name – имя обучающей функции, по умолчанию ' ';
epoch – число циклов обучения.
Пример:
Зададим 8 значений вектора входа P, соответствующий им вектор целей T, а также контрольное подмножество в виде векторов VV.P и VV.T:
P = 1:8; T = sin(P); VV.P = P; VV.T = T+rand(1,8)*0.1;
Создадим и обучим двухслойную сеть прямой передачи с четырьмя нейронами в первом слое с функцией активации tansig и одним нейроном во втором слое также с функцией активации tansig:
net = newff(minmax(P),[4 1],{'tansig','tansig'});
[net,tr] = train(net,P,T,[],[],VV);
В процессе выполнения процедуры train для построения графика точности обучения также применяется функция plotperf, и во многих случаях этого бывает достаточно для оценки процедуры обучения.
Однако функция plotperf позволяет оформить графики результатов обучения и по завершении этой процедуры, используя дополнительные аргументы.
Например, выполняя обучение с предельной точностью, заданной по умолчанию,
на заключительном графике можно указать требуемую точность и оценить длительность обучения (рис. 11.71):
plotperf(tr, 0.005) % Рис.11.71
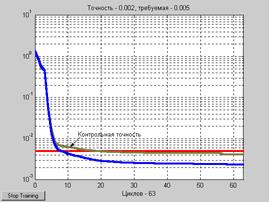 Рис. 11.71
Рис. 11.71
Для достижения требуемой точности обучения, равной 0.005, требуется не более
10 циклов.
Сопутствующие функции: TRAIN.
| ERRSURF, PLOTES | Вычисление и построение графика поверхности ошибки для нейрона |
Синтаксис:
ES = errsurf(p,t,wv,bv,f)
plotes(wv,bv,ES,v)
Описание:
Функция ES = errsurf(p, t, wv, bv, f) вычисляет массив ES, описывающий поверхность ошибки для нейрона с одним вектором входа p размера 1´Q, одним вектором целей t размера 1´Q; также должны быть заданы векторы весов wv и смещений b и функция активации нейрона f.
Функция plotes(wv, bv, ES, v) строит график поверхности ошибок и линий уровня для нейрона в зависимости от весов wv и смещений b, если задан массив ES, вычисленный
с помощью функции errsurf. Для удобства изображения поверхности в трехмерном пространстве можно изменять значение вектора v, который задает направление угла зрения, по умолчанию вектор v равен [–37.5, 30].
Пример:
p = [3 2];
t = [0.4 0.8];
wv = –4:0.4:4; bv = wv;
ES = errsurf(p,t,wv,bv,'logsig');
plotes(wv,bv,es,[60 30]) % Рис.11.72
Результат построения представлен на рис. 11.72.
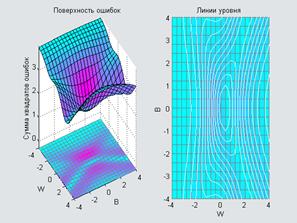 Рис. 11.72
Рис. 11.72
Сопутствующие функции: PLOTEP.
| PLOTEP | Построение траектории обучения на поверхности ошибки |
Синтаксис:
h = plotep(w,b,e)
h = plotep(w,b,e,h)
Описание:
Функция h = plotep(w, b, e) строит изображающую точку на графиках поверхности ошибок и линий уровня, построенных с помощью функции plotes.
Входные аргументы:
w – текущий вектор весов;
b – текущий вектор смещений;
e – текущая ошибка.
Выходные аргументы:
h – дескриптор, содержащий информацию для построения изображающей точки.
Функция h = plotep(w, b, e, h) – это рекуррентная форма вышеописанной функции,
которая позволяет построить траекторию движения изображающей точки.
Применение функции:
Возможность применения функции plotep для построения траектории обучения в пространстве настраиваемых параметров поясняется нижеприведенным script-файлом, который описывает сценарий построения такой траектории. Читатель может реализовать этот сценарий на своем компьютере. Авторы предполагают разместить наиболее интересные примеры расчета нейронных сетей в виде М-файлов на сайте www.mathworks.ru. Данный сценарий обязательно будет включен в число этих М-файлов.
| Script % Задание обучающей последовательности P = 1:8; T = sin(P); % Построение поверхности ошибок w_range = –1:0.2:1; b_range = –1:0.2:1; ES = errsurf(P, T, w_range, b_range, 'purelin'); plotes(w_range, b_range,ES); % Формирование нейронной сети maxlr = 0.40*maxlinlr(P, 'bias'); net = newlin([–2 2], 1, [0], maxlr); % Задание начальной точки subplot(1, 2, 2); h = text(sum(get(gca, 'xlim'))*0.5 sum(get(gca, 'ylim'))*0.5, '*Укажите точку*'); set(h,'horizontal', 'center', 'fontweight', 'bold'); [net.IW{1,1} net.b{1}] = ginput(1); delete(h); | % Построение траектории обучения limiting = net.trainParam.epochs; limloop = limiting+1; net.trainParam.epochs = 1; net.trainParam.goal =.001; net.trainParam.show = Inf; h = plotep(net.IW{1}, net.b{1}, mse(T–sim(net, P))); [net, tr] = train(net, P, T); r = tr; epoch = 1; cont = 1; while (length(r.epoch)<limloop & cont) epoch = epoch+1; [net, tr]=train(net, P, T); if length(tr.epoch)>1 h = plotep(net.IW{1,1}, net.b{1}, tr.perf(2), h); r.epoch = [r.epoch epoch]; r.perf = [r.perf tr.perf(2)]; r.vperf = [r.vperf NaN]; r.tperf = [r.tperf NaN]; else cont = 0; end; end; |
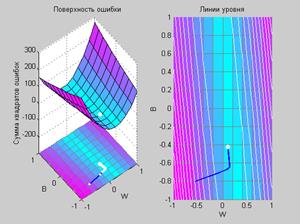 Рис. 11.73
Рис. 11.73
На рис. 11.73 показан результат выполнения сценария для построения траектории обучения в пространстве настраиваемых параметров. Траектории обучения наглядно видны на графиках линий уровня.
Сопутствующие функции: ERRSURF, PLOTES.








