 2015-09-06
2015-09-06 828
828Кафедра «Теория механизмов и машин»
Кинематический анализ кривошипно-шатунного механизма
на примере наноса простого действия.
Пояснительная записка задания.
Задача 4. Вариант 1.
Выполнил:Базан И.С.
Группа:23224/2
Проверил: Козликин Д.П.
Санкт-Петербург
I Кинематика рычажных механизмов
1. Разбиение механизма на структурные группы и определение степени подвижности

Рис. 1: Схема кривошипно- ползунного механизма.
 =1
=1

 =105мм
=105мм
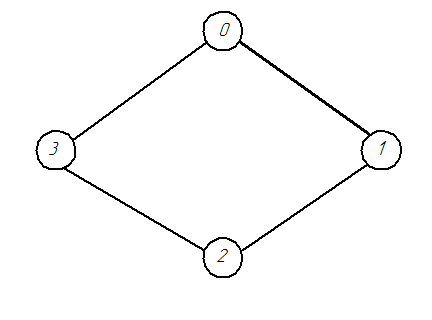
Рис. 2: Граф
2. План положений звеньев для 12-ти значений угла поворота кривошипа
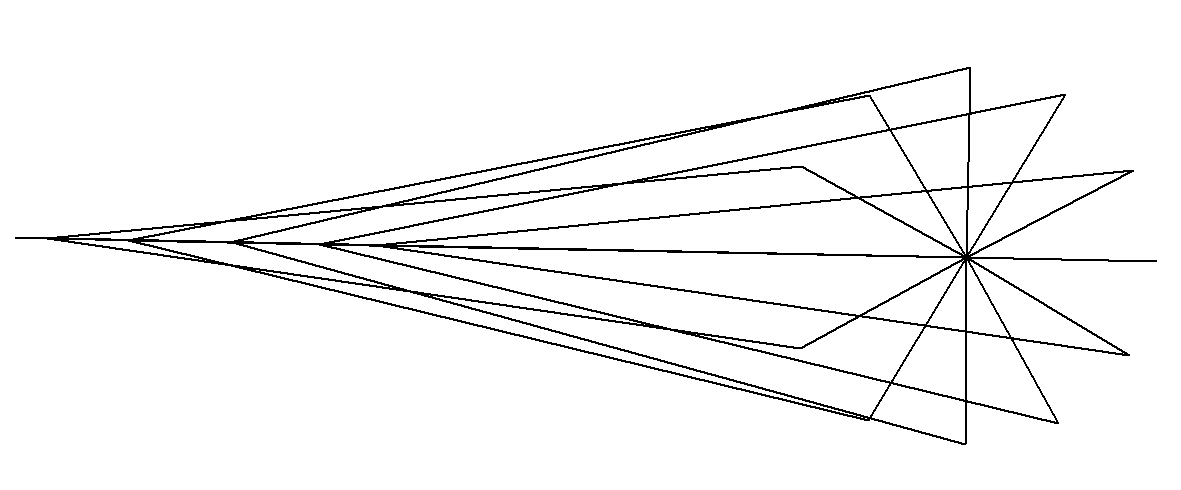
Рис.3:Схема звеньев 12-ти положений
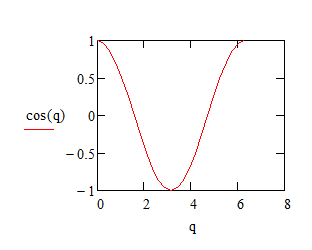
Рис.4:График изменения угла поворота
3.Построение планов скоростей и ускорений
 1)Положение ϕ=30
1)Положение ϕ=30
 =
=  +
+ 
OA*  = OB *
= OB *  + BA *
+ BA *  |
| 
OA*  *
*  =
=  * +BA*
* +BA*  *
* 
 * =
* =  * +
* +  *
*
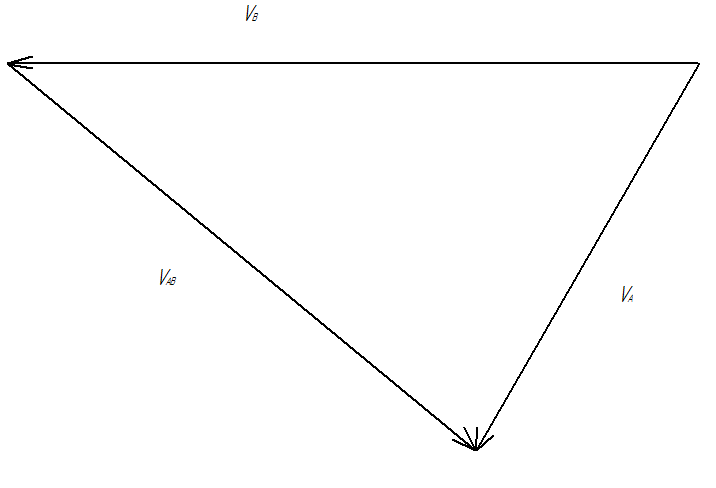
Рис.5:Векторная диаграмма скоростей механизма
 =1.58
=1.58  =1.38
=1.38
OA* * = * +BA*  * |
* |
-OA*  * =
* =  * +BA*
* +BA*  * - BA*
* - BA*  *
*
-  *
*  * +
* +  * -
* -  *
*
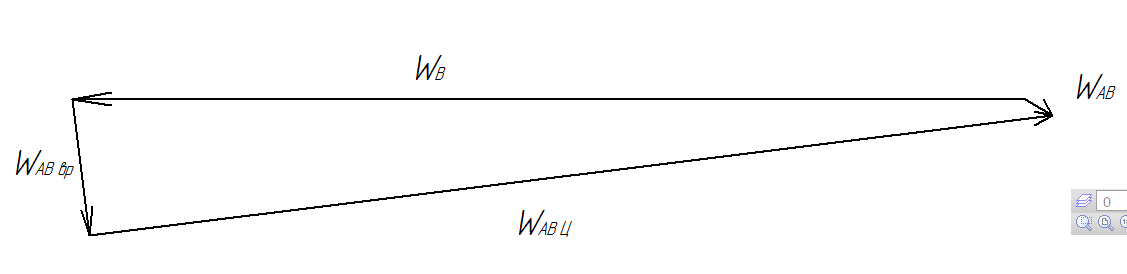
Рис.6:Векторная диаграмма ускорений механизма
2)Положение механизма в крайней точке ϕ=180(q=3.142)
 = +
= +
OA* = OB * + BA * |
OA* * = * +BA* *
* = * + *
 =0
=0
OA* * = * +BA* * |
Рис.7:Векторная диаграмма скоростей
-OA* * = * +BA* * - BA* *
- * * + * - *
= 
Рис.8:Векторная диаграмма ускорений механизма
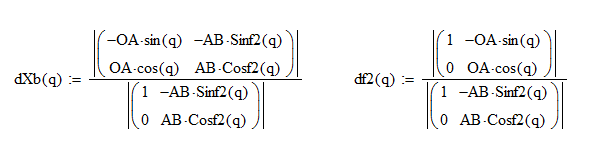
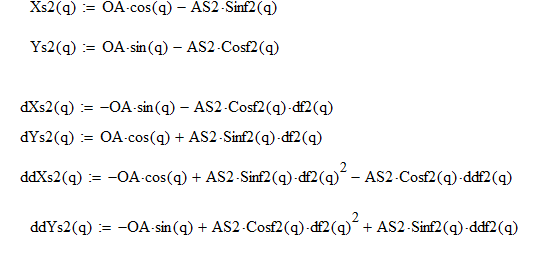
4. Аналоги скоростей и ускорений
OA*cosq=  +BA*cos
+BA*cos 

OA*sinq=BA*sin
-OA*sinq=  -BA*sin *
-BA*sin * 
OA*cosq=BA*cos 


II Динамическая Модель Механизма
2.1. Определение приведённого момента инерции машинного агрегата к валу кривошипа. Расчёт среднего значения момента инерции.
∑ma=∑F
∑m  =∑F
=∑F
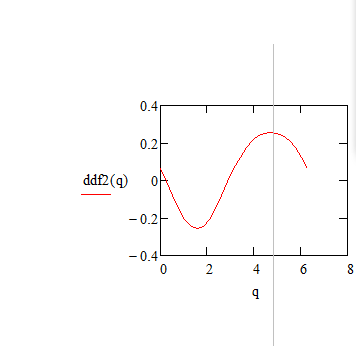
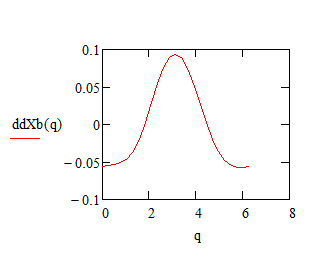
 (q)
(q) 



T=  T- кинетическая энергия
T- кинетическая энергия
T= 




 )
)
Метод последовательных приближений
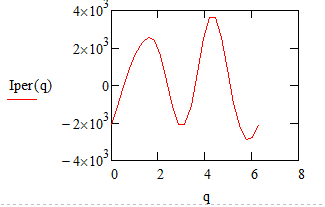

Рис 9:График зависимости  q
q
| φ | ||||||||||||
 | 8.84 | 9.051 | 9.23 | 9.32 | 9.22 | 8.94 | 8.45 | 9.13 | 9.42 | 9.32 | 8.96 | 8.76 |
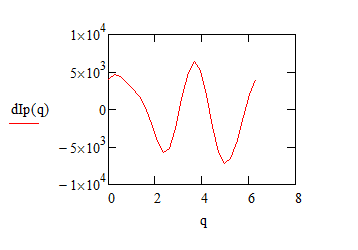
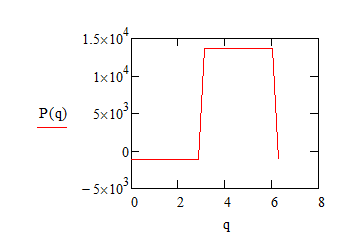
Рис 10:График зависимости  q
q
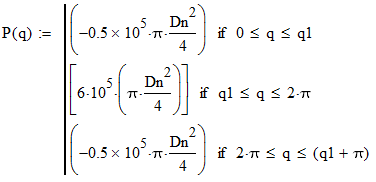 Рис 11:Зависимость рабочей нагрузки P то q
Рис 11:Зависимость рабочей нагрузки P то q




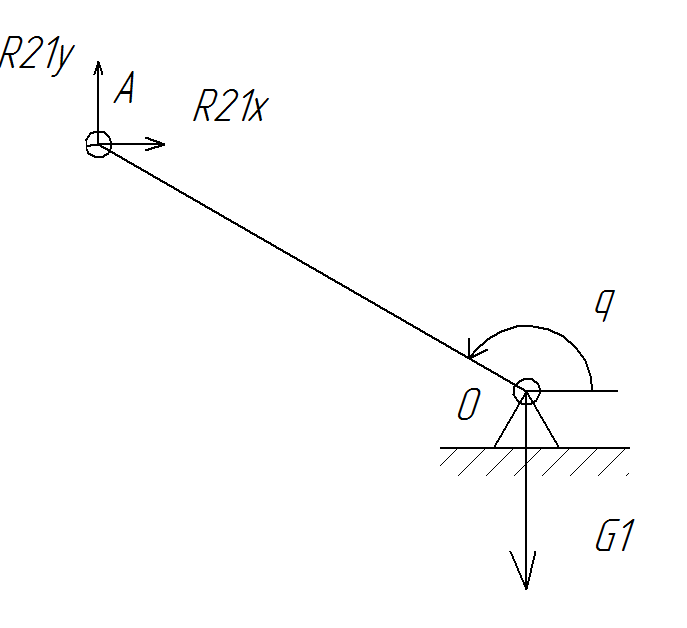
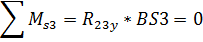
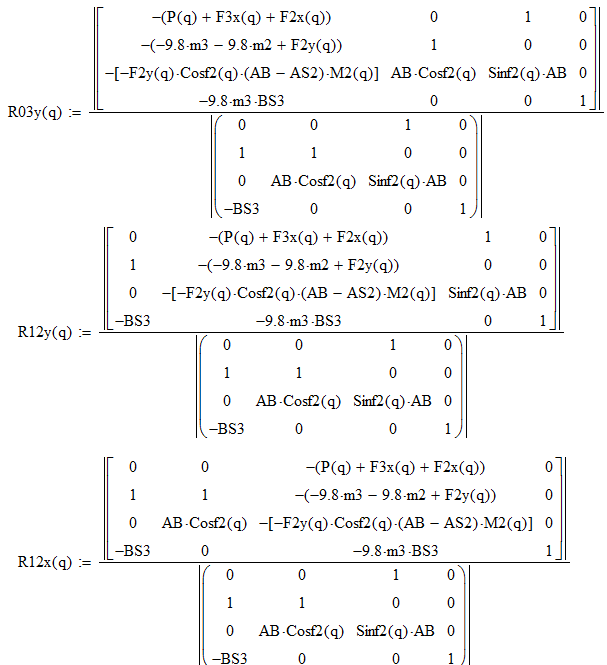
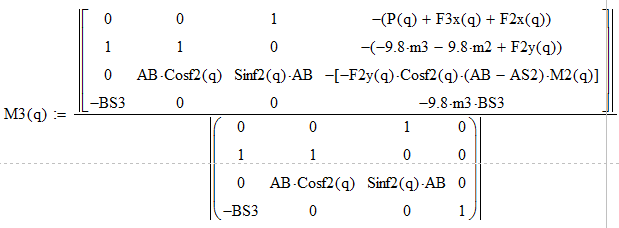
III Кинетический расчет механизма
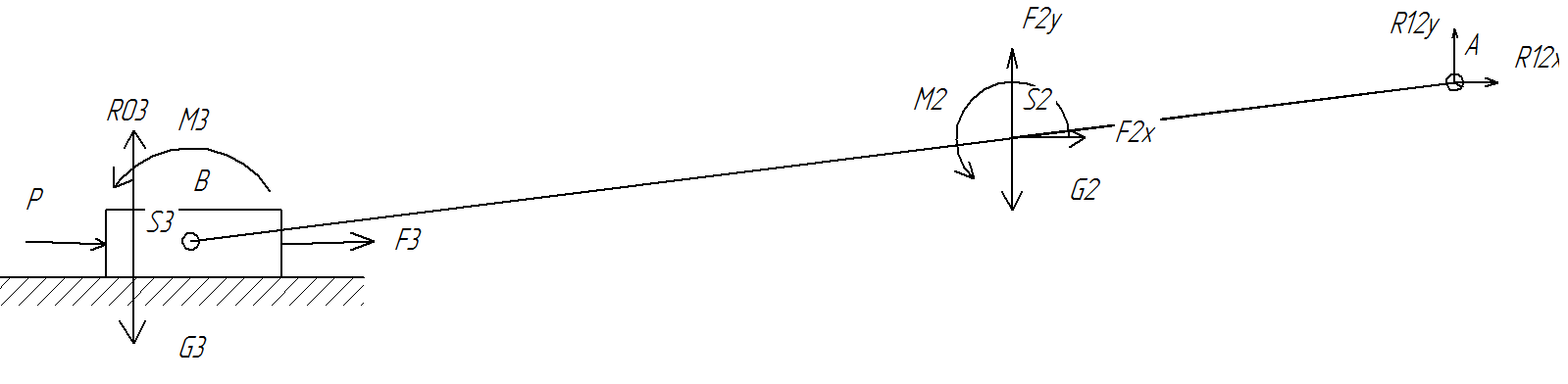
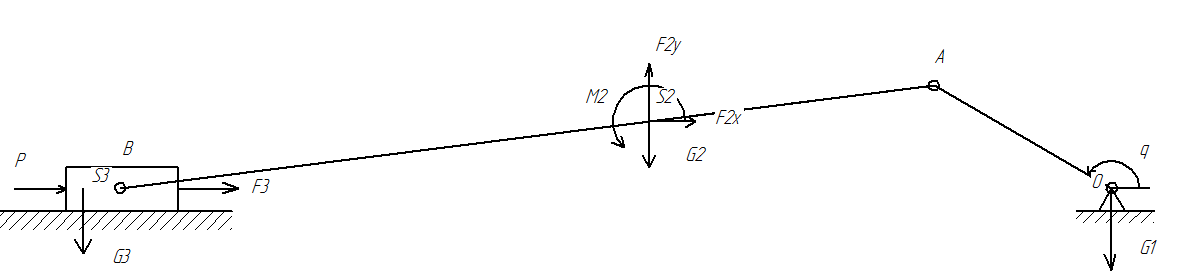
Рис 12:Кинематическая система 1) 1 Группа




 ;
;
 G- сила тяжести;
G- сила тяжести;
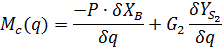
 M-момент кручения группы;P-рабочая нагрузка;Q-Движущий момент
M-момент кручения группы;P-рабочая нагрузка;Q-Движущий момент
 F-внешние силы
F-внешние силы
 2)2 Группа
2)2 Группа




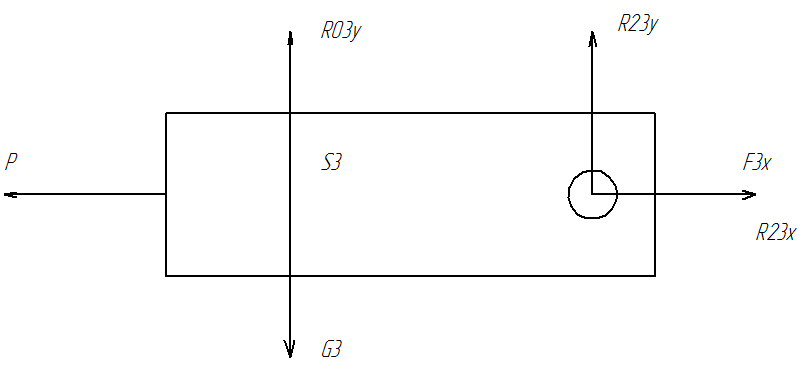 3)3 Группа
3)3 Группа




План сил для структурной группы при φ=60
Для структурной группы:
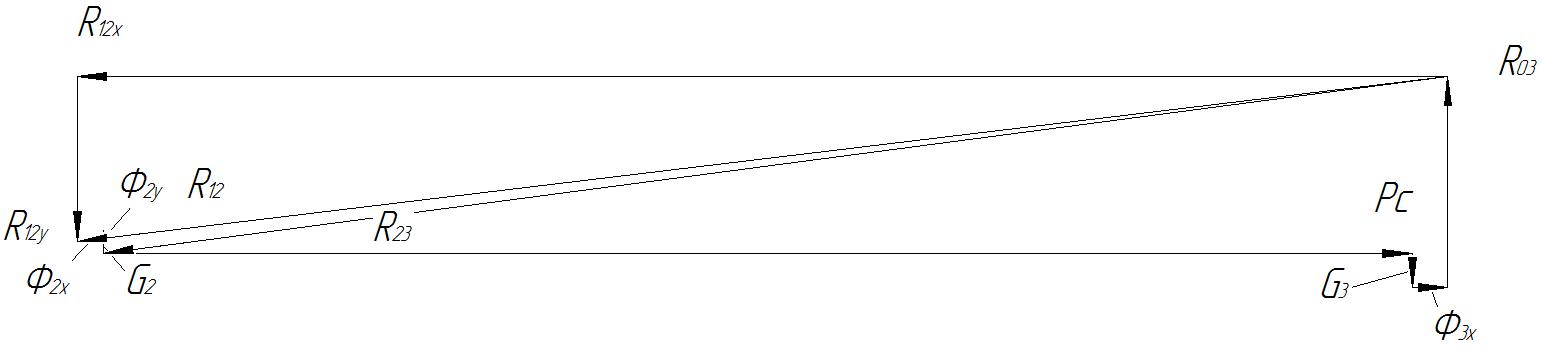 Для входного звена:
Для входного звена: 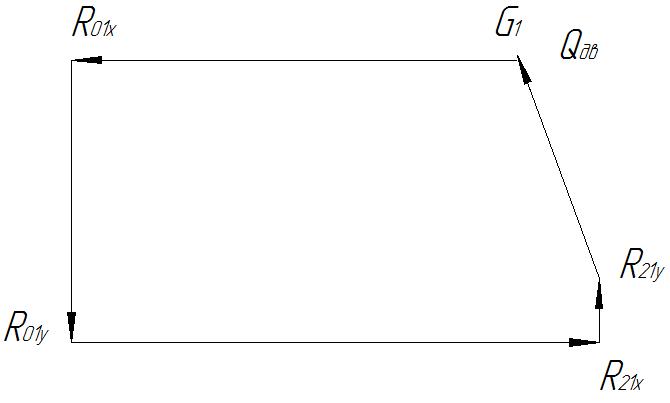
G2=196;G=107.8;G3=294; F2y=251;F2x=59.85
F3x=255.96;R12y=-415.69; R12x=819.35;
R23x=878.935; P=-1.13*10^3








