 2015-09-06
2015-09-06 356
356Представленная выше модель строилась для получения путем моделирования статистического распределения касаний палубы при заходе по оптической системе посадки.
Первый этап моделирования предназначался для поиска оптимального коэффициента усиления летчика, было выполнено 1060 реализаций при различных значениях  , который изменялся от значений от 0,323 до 0,436 с шагом 0,001 также моделирование было выполнено для значений коэффициентов усиления летчика 0,31; 0,32; и 0,44 (результаты приведены в таблице 1 приложения В) При каждом значении коэффициента усиления летчика задавалось 10 реализаций при варьируемых начальных фазах полигармонического сигнала, задающего атмосферные возмущения. Значение оптимального коэффициента усиления определялось по минимальному математическому ожиданию касаний, результирующая зависимость приведена на рисунке 1. В качестве параметра характеризующего ошибку слежения выбрана величина продольного отклонения от заданной точки касания.
, который изменялся от значений от 0,323 до 0,436 с шагом 0,001 также моделирование было выполнено для значений коэффициентов усиления летчика 0,31; 0,32; и 0,44 (результаты приведены в таблице 1 приложения В) При каждом значении коэффициента усиления летчика задавалось 10 реализаций при варьируемых начальных фазах полигармонического сигнала, задающего атмосферные возмущения. Значение оптимального коэффициента усиления определялось по минимальному математическому ожиданию касаний, результирующая зависимость приведена на рисунке 1. В качестве параметра характеризующего ошибку слежения выбрана величина продольного отклонения от заданной точки касания.
Рис. 1 Зависимость модуля продольного отклонения при касании палубы гаком от коэффициента усиления летчика.
Были получены 4 значения оптимального коэффициента усиления  для которых математические ожидания продольных отклонений составили
для которых математические ожидания продольных отклонений составили  соответственно. Величина
соответственно. Величина  была выбрана из соображений, что отрицательная величина продольных отклонений касания гаком более предпочтительна, так как соответствует касанию гаком палубы до троса на минимальном отклонении, что должно соответствовать зацеплению заданного троса финишера. Положительное значение математического ожидания соответствует касанию гаком после заданного троса и зацепление возможно только за следующий трос.
была выбрана из соображений, что отрицательная величина продольных отклонений касания гаком более предпочтительна, так как соответствует касанию гаком палубы до троса на минимальном отклонении, что должно соответствовать зацеплению заданного троса финишера. Положительное значение математического ожидания соответствует касанию гаком после заданного троса и зацепление возможно только за следующий трос.
Для определения распределения касаний палубы принято гипотеза о выдерживании летчиком оптимального коэффициента усиления с точностью  ,что соответствует летчику с хорошей подготовкой при этом в зависимости от числа реализаций коэффициент усиления летчика распределен по нормальному закону, также принято допущение о постоянстве в процессе одной реализации. Функция распределения изменения от реализации к реализации (приведенная на рисунке 2) имеет вид
,что соответствует летчику с хорошей подготовкой при этом в зависимости от числа реализаций коэффициент усиления летчика распределен по нормальному закону, также принято допущение о постоянстве в процессе одной реализации. Функция распределения изменения от реализации к реализации (приведенная на рисунке 2) имеет вид  , так как принято то изменяется от 0,304 до 0,414 по нормальному закону распределения, для которого
, так как принято то изменяется от 0,304 до 0,414 по нормальному закону распределения, для которого  ;
;
Рис. 2 Функция распределения изменения от реализации к реализации
Для вычисления продольных отклонений при коэффициентах усиления летчика не входивших в начальный этап моделирования были выполнены еще 160 реализаций.
|
 ; соответственно для трех заходов вероятность попадания гаком на блок составляет
; соответственно для трех заходов вероятность попадания гаком на блок составляет  , математическое ожидание составляет mΔx=-3,26м, среднеквадратическое отклонение составляет σΔx=8,66м.
, математическое ожидание составляет mΔx=-3,26м, среднеквадратическое отклонение составляет σΔx=8,66м.
Рис. 3 Гистограмма продольных отклонений от заданной точки касания гаком по абсолютной величине при выбранной гипотезе распределения .
Вероятность  вычислялась по отношению количества попаданий за пределами посадочного блока к общему числу реализаций. Для представленной выше гистограммы число непопаданий на блок(+12;-24м) составило 42 при общей выборке составляющей 460 реализаций. Вероятность вычислялась при допущении отсутствия явления «промятия троса» и возможного отскока гака прикасании палубы.
вычислялась по отношению количества попаданий за пределами посадочного блока к общему числу реализаций. Для представленной выше гистограммы число непопаданий на блок(+12;-24м) составило 42 при общей выборке составляющей 460 реализаций. Вероятность вычислялась при допущении отсутствия явления «промятия троса» и возможного отскока гака прикасании палубы.
Верификация модели проводилась по сравнению математического ожидания и среднеквадратического отклонения, полученных на модели с результатами полунатурных экспериментов выполненных в работе «Ирбит», для конфигурации М9-12, исходные параметры которой использовались в настоящей работе, для 30 реализаций выполненных с участием реальных летчиков математическое ожидание составляет mΔx=-6,56м, среднеквадратическое отклонение составляет σΔx=6,88м. Полученные значения имеют один порядок что позволяет судить о сходимости разработанной модели с результатами полунатурного эксперимента.
Выполнена оценка влияния постоянной времени запаздывания летчика на вероятность попадания на блок. Для моделирования были выбраны 3 постоянные времени запаздывания:  . Для приведенных постоянных времени были выполнены дополнительно 300 реализаций для которых начальные фазы полигармонического сигнала менялись в соответствии с десятичной разрядной сеткой числа π, для каждого коэффициента усиления летчика варьируемого с шагом 0, 004 были сделаны по 3 реализации, вычислены математические ожидания продольных отклонений при каждом Кл, по результатам которых были построены зависимости |MΔx|=f(Kл) представленные на рисунке 4
. Для приведенных постоянных времени были выполнены дополнительно 300 реализаций для которых начальные фазы полигармонического сигнала менялись в соответствии с десятичной разрядной сеткой числа π, для каждого коэффициента усиления летчика варьируемого с шагом 0, 004 были сделаны по 3 реализации, вычислены математические ожидания продольных отклонений при каждом Кл, по результатам которых были построены зависимости |MΔx|=f(Kл) представленные на рисунке 4
 Рисунок 4 Зависимость модуля продольного отклонения при касании палубы гаком от коэффициента усиления летчика, для разных постоянных времени запаздывания летчика.
Рисунок 4 Зависимость модуля продольного отклонения при касании палубы гаком от коэффициента усиления летчика, для разных постоянных времени запаздывания летчика.
С использованием гипотезы о нормальном законе распределения коэффициента усиления летчика, были выбраны по 27 реализаций по которым были построены распределения продольных отклонений по абсолютной величине (рисунки 5, 6, 7) и были вычислены вероятности попадания гаком на посадочный блок для разных постоянных времени запаздывания летчика.
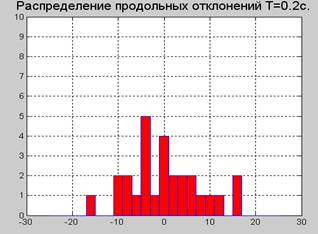
Рис. 5 Гистограмма продольных отклонений от заданной точки касания гаком по абсолютной величине при  .
.

Рис. 6 Гистограмма продольных отклонений от заданной точки касания гаком по абсолютной величине при  .
.

|
 .
.
Вычисленные вероятности, математические ожидания и среднеквадратические отклонения для различных постоянных времени запаздывания летчика приведены в таблице 2 в сравнении с результатами обработки выборки из 460 реализаций полученных на модели и результатами полунатурных экспериментов на пилотажном стенде ТМ-21 106 кафедры МАИ.
Таблица 2
| .
| .
| .
| 
| ТМ-21 | |
| P попадания на блок | 0,926 | 0,889 | 0,815 | 0,909 | н/д |
| mΔX, м | 0,33 | 1,02 | 1,18 | -3,26 | -6,56 |
| σΔx, м | 4,69 | 5,65 | 5,72 | 8,66 | 6,88 |

| 0,344 | 0,336 | 0,322 | 0,359 | |
| Число реализаций |
Выводы
Сравнение результатов моделирования позволяет сделать вывод о значительном влиянии постоянной времени запаздывания летчика на вероятность попадания на финишерный блок, так при изменении постоянной времени запаздывания летчика с 0,2 сек до 0,5 падает с 0, 926 до 0,815(требуемая по НТД вероятность успешной палубной посадки  ), что позволяет сделать вывод о необходимости улучшения динамических свойств замкнутой системы «летчик-самолет», за счет применения перспективных средств индикации, таких как дополнительная индикация вектора скорости, которые позволяют уменьшить
), что позволяет сделать вывод о необходимости улучшения динамических свойств замкнутой системы «летчик-самолет», за счет применения перспективных средств индикации, таких как дополнительная индикация вектора скорости, которые позволяют уменьшить  , и тем самым повысит вероятность попадания на блок.
, и тем самым повысит вероятность попадания на блок.
Другими способом улучшения свойств системы «летчик-самолет» является улучшение динамических свойств самолета за счет совершенствования системы управления самолета, а также за счет использования перспективных средств управления траекторией, каких как непосредственное управление подъемной силой самолета (НУПС).








