 2015-09-06
2015-09-06 2483
2483Цель работы: Измерение момента инерциитвердых тел, исследование зависимости момента инерции от формы тела.
Приборы и принадлежности: маховик Обербека, набор грузов, штатив универсальный, линейка, штангенциркуль, датчик угловой скорости с муфтой, измерительный блок L- микро.
Введение
В лабораторной работе рассматривается вращательное движение устройства, которое исторически получило название маховика Обербека.
Для описания вращательного движения, как и для описания поступательного движения, используется ряд параметров, определения некоторых из которых приведены в таблице 1
Таблица 1
| ПАРАМЕТРЫ, ХАРАКТЕРИЗУЮЩИЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ПО ПРЯМОЙ | ПАРАМЕТРЫ, ХАРАКТЕРИЗУЮЩИЕ ПЛОСКОЕ ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ |
D  - перемещение (x - координата) - перемещение (x - координата) |  - угол поворота j- величина угла поворота - угол поворота j- величина угла поворота |
 - скорость; - скорость;  |  - угловая скорость; - угловая скорость;  |
 | |
 - ускорение; - ускорение;  |  - угловое ускорение; - угловое ускорение;  |
 | |
 - импульс - импульс |  - момент импульса отн. точки; L = r×p×sin a - момент импульса отн. точки; L = r×p×sin a |
 - сила - сила |  = =  - момент силы отн. точки; M = r×F×sin a - момент силы отн. точки; M = r×F×sin a |
| M - масса | I = Smi ri2 – момент инерции |
Сходным образом записываются и формулы основных законов, поступательного и вращательного движения (см. таблицу 2).
Таблица 2
| НЕКОТОРЫЕ ОПРЕДЕЛЕНИЯ И ФОРМУЛЫ, ОПИСЫВАЮЩИЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ПО ПРЯМОЙ | НЕКОТОРЫЕ ОПРЕДЕЛЕНИЯ И ФОРМУЛЫ, ОПИСЫВАЮЩИЕ ПЛОСКОЕ ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ | ||||
| | u |= const - равномерное движение: х = х 0 ±| u | t | w = const - равномерное вращение: j = j ±|w| t | ||||
движение: х = х 0 ± | u 0 | t ± | e = const - равнопеременное вращение: j = j ±|w0 | t ±  w=±|w0|±|e| t w=±|w0|±|e| t | ||||
Второй закон Ньютона (основной закон динамики):  - в общем случае; или - в общем случае; или  - при m = const, где - при m = const, где  - равнодействующая всех сил, действующих на тело - равнодействующая всех сил, действующих на тело | Основной закон динамики вращательного движения:  - в общем случае; или - в общем случае; или  - для абсолютно твёрдого тела, где - для абсолютно твёрдого тела, где  - равнодействующий момент всех сил, действующих на тело - равнодействующий момент всех сил, действующих на тело |
 u =± | u 0 | ± | а | t
u =± | u 0 | ± | а | tИз приведённых выше формул следует, в частности, что аналогом массы при вращательном движении является момент инерции I; определению I маховика Обербека при различных положениях грузов на спицах и посвящена настоящая работа.
Напомним, что момент инерции тела I относительно некоторой оси является мерой инертности тела при вращении его вокруг этой оси. Для материальной точки момент инерции равен произведению ее массы на квадрат расстояния до оси вращения:
I = mr2,
а для тела, которое можно представить в виде системы большого количества материальных точек (рис. 1.а), момент инерции относительно некоторой оси вращения равен сумме произведений масс всех материальных точек на квадраты их расстояний до этой оси:
 . (1)
. (1) 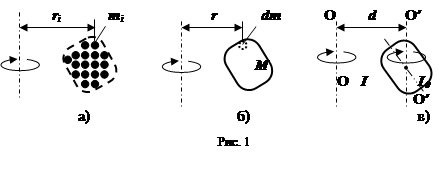
Для вычисления момента инерции сплошного тела его мысленно разбивают на бесконечное малые области с массами dm,каждая из которых находится на своём расстоянии r от оси вращения (рис. 1.б); I находят интегрированием по всем этим областям:
I =  .
.
Понятно, что момент инерции зависит не только от общей массы тела, но и от формы тела, а также – от распределения массы по его объёму (так, например, какие-то части тела могут быть изготовлены из более тяжёлого материала, а какие-то – из более лёгкого).
Ось вращения может проходить через центр масс тела, а может и находиться вне его (рис. 1.в). Во втором случае для вычисления момента инерции пользуются теоремой Штейнера.
Момент инерции тела I относительно произвольной оси равен сумме момента инерции I 0 относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела т на квадрат расстояния d между осями:
I = I 0 + md 2. (2)
При конструировании технических устройств, содержащих вращающиеся детали (на железнодорожном транспорте, в самолетостроении, электротехнике и т.д.), требуется знание величин моментов инерции этих деталей. При сложной форме тела теоретический расчет его момента инерции может оказаться трудно выполнимым. В этих случаях предпочитают измерить момент инерции нестандартной детали опытным путем.

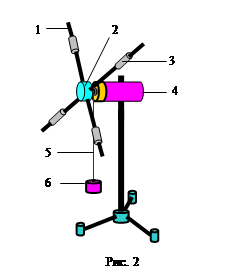 При выполнении лабораторной работы Вам необходимо измерить момент инерции маятника Обербека в двух случаях: в отсутствие грузов на стержнях и при максимальном удалении грузов от оси вращения. В каждом случае раскрутка маятника проводится одним из двух перегрузков (6) – по выбору преподавателя.
При выполнении лабораторной работы Вам необходимо измерить момент инерции маятника Обербека в двух случаях: в отсутствие грузов на стержнях и при максимальном удалении грузов от оси вращения. В каждом случае раскрутка маятника проводится одним из двух перегрузков (6) – по выбору преподавателя.
Рассмотрим движение маятника Обербека, используя законы динамики. Перегрузок (6) массой т П на нити (5) движется поступательно с ускорением a под действием силы тяжести m П g и силы натяжения нити T. Можно записать уравнение второго закона Ньютона для этого груза:
m П g - T = m П a. (3)
Отсюда находим силу натяжения нити: Т = т П(g - а) и вычисляем момент M этой силы относительно оси вращения:
M = Tr = т П(g - а) r, (4)
где r – радиус цилиндрической поверхности-муфты, на которую намотана нить).
т П(g - а) r = I· e, (5)
где e - угловое ускорение вращающегося маятника, причём а = e r.
Эта формула может быть использована для определения момента инерции I 1 крестовины с грузами:
I 1= m П(g - e1 r) r/ e1 (6)
и без грузов:
I 2= m П(g - e2 r) r/ e2. (7)
Момент инерции крестовины с грузами может быть также представлен в виде:
I 1= I 2 + I г, (8)
где I г – момент инерции четырёх грузов.
Таким образом, появляется возможность экспериментального определения момента инерции грузов на крестовине:
I г = I 1- I 2 = m П(g - e1 r) r/ e1- m П(g - e2 r) r/ e2. (9)
Результаты вычислений по формуле (9) предлагается сравнить с теоретическим значением момента инерции грузов I г*, рассчитываемым в предположении, что размерами грузов много меньше расстояния от их центра до оси вращения крестовины:
I г* = m 1 R 12+ m 2 R 22 + m 3 R 3 2 + m 4 R 42, (10)
в которой m 1, m 2 , m 3 и m 4 – массы каждого из четырёх грузов, а R 1, R 2 , R 3 и R 4 – расстояния от центров этих грузов до оси вращения.
Запишите значения масс грузов m i в таблицу 3. Установите грузы на стержнях в непосредственной близости от концов стержней. Измерьте удаление R i каждого из грузов от оси вращения и внесите полученные значения в ту же таблицу.
Закрепите один конец нити длиной 25 - 30 см на катушке муфты датчика угловой скорости и прикрепите к другому ее концу один из перегрузков (6). Перед запуском маятника Вам будет необходимо намотать нить на катушку муфты и таким образом поднять перегрузок над поверхностью стола.








